基于PSoC?4 的PMSM无传感器矢量控制
摘要:本文介绍了基于Cypress PSoC®4平台的PMSM无传感器FOC解决方案。方案采用改进滑模控制器进行位置估算,可有效消除抖振现象;PSoC®4内部集成两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器,无需外部运放即可完成电流采样;四个可支持中央对齐PWM及同步ADC操作TCPWM模块,可灵活完成三相电机的控制。
关键字:PSoC®4,矢量控制,无传感器, 滑模观测器
Abstract: This paper introduces the sensorless FOC solution based on Cypress new product PSoC®4. PSoC4 owns rich on-chip resources which can realize high integrated design. With two internal opamplifiers, PSoC4 can implement two phase currents sensing without external chips; Four TCPWMs which support center-aligned PWM and programmable dead zone can flexibly control three-phase inverter.
Keywords: PSoC®4,FOC,Sensorless, Slide Mode Observer, Motor control
1. 引言
永磁同步电动机(PMSM)因其体积小、重量轻、功率密度高等优点而广泛应用于航空、航天、工业等领域。在PMSM驱动系统中, 无位置传感器空间矢量控制技术是一种成本低、可靠性好、维护简单的控制策略,避免了安装传感器(如旋转变压器、编码盘等)带来的系统体积重量增大、维护难等问题,并可适用于一些特殊场合,如空调压缩机等。PMSM无位置传感器空间矢量控制技术的难点在于转子位置的估算,近年来许多学者对此进行了深入的研究,提出了很多方法,如反电动势过零检测、高频注入法、卡尔曼滤波、模型参考自适应法、各种观测器法等。在这些方法中,滑模观测器由于其鲁棒性强、对系统参数变化及外界扰动不敏感、易于工程实现等优点,在交流调速系统中得到了广泛的应用。本文将讨论基于滑模观测器的无传感器矢量控制技术。
2. PMSM无传感器矢量控制原理
状态观测器的实质就是重构控制系统的状态,将原系统中可以直接测量的变量作为新构造系统的输入信号,并使构造新系统的输出信号在一定条件下等于原系统的状态。滑模变结构控制就是根据系统当前的状态的不同,反馈控制器的结构按照事先规定的控制法则有目的地、不断地变化。通过控制系统结构的不断变化,最终使得系统的结构以极高的频率来回切换,系统的状态点做高频的上下穿越运动即滑模运行。由于变结构控制的这种独特的不连续的控制特点,它对被控对象的数学模型的精确程度要求不高,尤其是在控制过程中被控对象参数的变化和外部干扰,这些都不会对变结构控制的控制精度产生较大的影响,即变结构控制对外界的干扰有很强的鲁棒性。
变结构控制的基本原理是:在变结构控制中,控制量根据设定的控制法则在u+(x) 或u−(x) 之间切换. 变结构控制就是根据系统当前的状态的不同,反馈控制器的结构按照事先规定的控制法则有目的地、不断地变化,最终使得系统的结构以极高的频率不停地来回切换,系统的运动点则以极小的幅度和极高的频率在S(x)=0 上下穿越。这种特殊的状态叫做“滑模状态”。此时,这种变结构控制就叫滑模变结构控制。此时,称S(x)=0 被称作滑模面,S=S(x) 为切换函数。
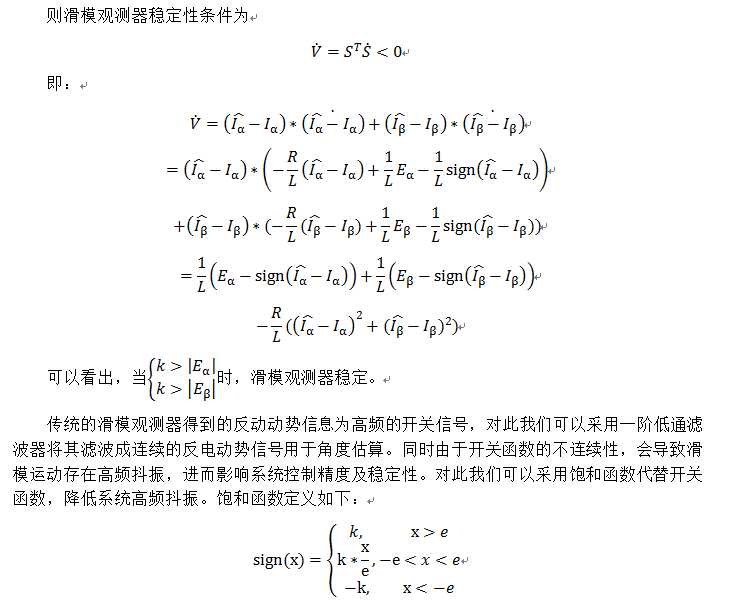
滑模观测器设计
等式2减去等式1可得:

无传感器矢量控制
图1 无传感器FOC控制框图
图1为无传感器FOC控制框图。整个FOC控制的核心是坐标变换,通过坐标变换将采样所得的三相电流转换成转矩电流分量i_q和磁通电流分量i_d。通过PI控制器分别对i_q和i_d进行控制,并将i_d的参考值设置为0实现最大转矩控制。三相电流采样重构后经过滑模观测器,一方面获得转子位置角,用于坐标变换,另一方面可利用角度信息获取速度信息,用于速度控制。最后通过FOC SVPWM法对三相逆变器进行控制,实现逆变驱动PMSM运行。
1. 基于PSoC®4 的无传感器矢量控制方案
PSoC4简介
PSoC®4 是基于ARM Cortex-M0 CPU的可编程嵌入式系统控制器家族,它集合了可编程模拟资源、可编程内部互联、用户可编程数字逻辑、通用的固定功能外设计以及高性能的ARM Cortex-M0 CPU子系统。相对于PSoC3、PSoC5系列产品的各个方面, PSoC®4都做了很大的改进。PSoC®4现包含CY8C4100 和CYCY8C4200两个产品系列,PSoC4100系列是基于ARM内核的最低成本的PSoC,它将PSoC的灵活性和高集成度引入对成本敏感的大批量生产的产品中。PSoC4200系列拥有速度更快的处理器,更高的ADC采样速度,以及基于PLD的增强型通用数字模块(UDB)。以下概括了其主要特性。
· 高性能 Cortex-M0 CPU 内
- 基于CY8C3866的无线脑电信号采集检测系统设计(06-24)
- 解读USB控制器芯片及其在图像采集中的应用(06-06)
- 基于PSoC?4的矢量控制方案 :电流采样(06-04)
- 基于CYUSB3014高速实时数据采集系统的设(04-23)
- 一款基于CYPRESS的USB3.0总线设计(03-19)
- 一种基于PSoC的汽车中控台面板设计(03-10)