μC/OS-II的内核结构
解释见第四章,任务管理。
3.2 任务状态
图3.1是μC/OS-Ⅱ控制下的任务状态转换图。在任一给定的时刻,任务的状态一定是在这五种状态之一。
睡眠态(DORMANT)指任务驻留在程序空间之中,还没有交给μC/OS-Ⅱ管理,(见程序清单L3.1或L3.2)。把任务交给μC/OS-Ⅱ是通过调用下述两个函数之一:
OSTaskCreate()或OSTaskCreateExt()。当任务一旦建立,这个任务就进入就绪态准备运行。任务的建立可以是在多任务运行开始之前,也可以是动态地被一个运行着的任务建立。如果一个任务是被另一个任务建立的,而这个任务的优先级高于建立它的那个任务,则这个刚刚建立的任务将立即得到CPU的控制权。一个任务可以通过调用OSTaskDel()返回到睡眠态,或通过调用该函数让另一个任务进入睡眠态。
调用OSStart()可以启动多任务。OSStart()函数运行进入就绪态的优先级最高的任务。就绪的任务只有当所有优先级高于这个任务的任务转为等待状态,或者是被删除了,才能进入运行态。
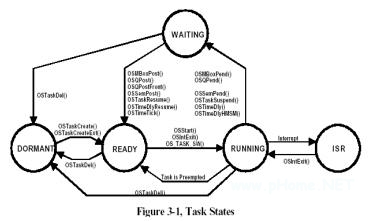
图3.1任务的状态
正在运行的任务可以通过调用两个函数之一将自身延迟一段时间,这两个函数是OSTimeDly()或OSTimeDlyHMSM()。这个任务于是进入等待状态,等待这段时间过去,下一个优先级最高的、并进入了就绪态的任务立刻被赋予了CPU的控制权。等待的时间过去以后,系统服务函数OSTimeTick()使延迟了的任务进入就绪态(见3.10节,时钟节拍)。
正在运行的任务期待某一事件的发生时也要等待,手段是调用以下3个函数之一:
OSSemPend(),OSMboxPend(),或OSQPend()。调用后任务进入了等待状态(WAITING)。当任务因等待事件被挂起(Pend),下一个优先级最高的任务立即得到了CPU的控制权。当事件发生了,被挂起的任务进入就绪态。事件发生的报告可能来自另一个任务,也可能来自中断服务子程序。
正在运行的任务是可以被中断的,除非该任务将中断关了,或者μC/OS-Ⅱ将中断关了。被中断了的任务就进入了中断服务态(ISR)。响应中断时,正在执行的任务被挂起,中断服务子程序控制了CPU的使用权。中断服务子程序可能会报告一个或多个事件的发生,而使一个或多个任务进入就绪态。在这种情况下,从中断服务子程序返回之前,μC/OS-Ⅱ要判定,被中断的任务是否还是就绪态任务中优先级最高的。如果中断服务子程序使一个优先级更高的任务进入了就绪态,则新进入就绪态的这个优先级更高的任务将得以运行,否则原来被中断了的任务才能继续运行。当所有的任务都在等待事件发生或等待延迟时间结束,μC/OS-Ⅱ执行空闲任务(idletask),执行OSTaskIdle()函数。
3.3 任务控制块(TaskControlBlocks,OS _TCBs)
一旦任务建立了,任务控制块OS _TCBs将被赋值(程序清单3.3)。任务控制块是一个数据结构,当任务的CPU使用权被剥夺时,μC/OS-Ⅱ用它来保存该任务的状态。当任务重新得到CPU使用权时,任务控制块能确保任务从当时被中断的那一点丝毫不差地继续执行。OS _TCBs全部驻留在RAM中。读者将会注意到笔者在组织这个数据结构时,考虑到了各成员的逻辑分组。任务建立的时候,OS _TCBs就被初始化了(见第四章任务管理)。
程序清单 L3.3μC/OS-II任务控制块.
typedefstructos_tcb{
OS_STK*OSTCBStkPtr;
#ifOS_TASK_CREATE_EXT_EN
void*OSTCBExtPtr;
OS_STK*OSTCBStkBottom;
INT32UOSTCBStkSize;
INT16UOSTCBOpt;
INT16UOSTCBId;
#endif
structos_tcb*OSTCBNext;
structos_tcb*OSTCBPrev;
#if(OS_Q_EN(OS_MAX_QS>=2))||OS_MBOX_EN||OS_SEM_EN
OS_EVENT*OSTCBEventPtr;
#endif
#if(OS_Q_EN(OS_MAX_QS>=2))||OS_MBOX_EN
void*OSTCBMsg;
#endif
INT16UOSTCBDly;
INT8UOSTCBStat;
INT8UOSTCBPrio;
INT8UOSTCBX;
INT8UOSTCBY;
INT8UOSTCBBitX;
INT8UOSTCBBitY;
#ifOS_TASK_DEL_EN
BOOLEANOSTCBDelReq;
#endif
}OS_TCB;
.OSTCBStkPtr 是指向当前任务栈顶的指针。μC/OS-Ⅱ允许每个任务有自己的栈,尤为重
要的是,每个任务的栈的容量可以是任意的。有些商业内核要求所有任务栈的容量都一
样,除非用户写一个复杂的接口函数来改变之。这种限制浪费了RAM,当各任务需要的栈
空间不同时,也得按任务中预期栈容量需求最多的来分配栈空间。OSTCBStkPtr是OS_TCB
数据结构中唯一的一个能用汇编语言来处置的变量(在任务切换段的代码Context-
switchingcode之中,)把OSTCBStkPtr放在数据结构的最前面,使得从汇编语言中处理
这个变量时较为容易。
.OSTCBExtPtr 指向用户定义的任务控制块扩展。用户可以扩展任务控制块而不必修改μ
C/OS-Ⅱ的源代码。.OSTCBExtP
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)