基于安芯一号单片机的医用输液器智能控制系统设计
间的获取,软件程序将获取的总重量减去称重传感器毛重及输液瓶重量后即为输液的重量,再通过每1s的采样获取输液重量的变化,即可计算出剩余时间。但实际中并不完全是这样的。由于在实际中输液的速度极慢,碍于传感器的精度有限,在1s的采样周期内,采集到的输液重量几乎不变,无法进行剩余时间的预测。为了克服这种情况,我们参照光电编码器里的T测量转速的办法,通过测量在第n个1s内输液重量改变1个单位,再将n乘以1s采样周期内改变1个单位所算得的剩余时间,这才得到输液剩余时间。
由于输液瓶并不是静止不动的,每时每刻它都受到各种力的作用。这会对我们重力的测量带来各种干扰。为了尽量降低这种干扰的影响,我们的软件程序中对运算得到的重量变化率进行了简单的一阶滤波,这能有效地降低高频干扰的影响。不过,这样依然不够的,如输液瓶遭到人为施加的晃动时,剩余时间会突变得非常严重的。故我们的程序中,通过每三个变化周期里其剩余时间变化一致时才认为采集到的数据为正确的数据。通过这种办法,能够很好解决外部大的干扰带来的影响。
在此,我们只是介绍了软件设计中所用到的重要技术,详细的软件设计将在后面的软件设计中论述。
三、项目设计
1、硬件设计
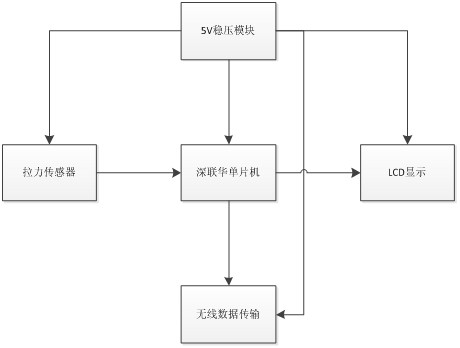
图3-1 硬件总体框图
简要说明一下,我们采用的供电方案是:由220V市电经电源适配器得到5-12V,然后经过LM2940-5.0线性稳压芯片得到5V,再给单片机、传感器、LCD显示屏和无线模块供电。
由于拉力传感器受压后输出值改变量小,故需要经过放大电路后再送到单片机的AD口进行模数转换以得到足够的精度。而由于HX711芯片内部已自带128倍可编程放大器,故不需要在外部电路多加放大电路。
由于医院的输液室不算宽广,而且输液悬挂点较多。针对这种情况,无线模块使用Zigbee是最合适的。但手头上暂无Zigbee,只有以前用过的XL02-232AP1。故无线模块暂定于XL02-232AP1。
为了开发的方便,LCD显示屏暂时利用手头上已有的OLED 128*64 0.96寸黄蓝双色显示屏。
以下是系统的硬件原理图:
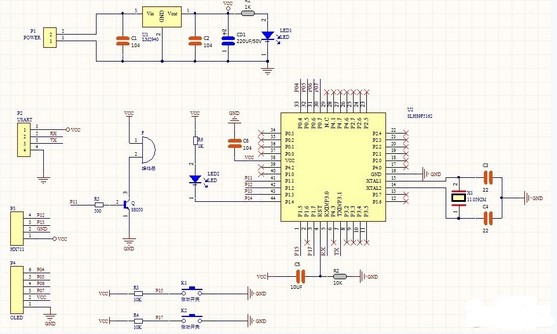
图3-2 系统硬件原理图
由于时间紧急,我们并没有PCB打样。我们利用以前用过的旧板上通过飞线焊接,搭建最小系统。实物图如下所示:
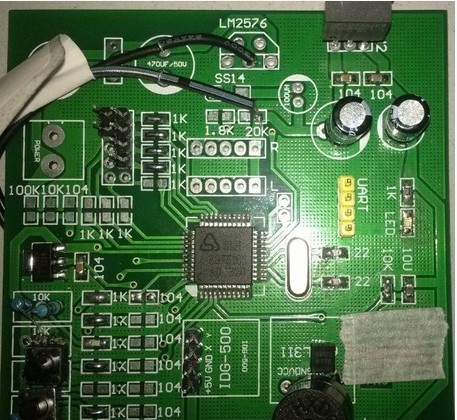
图3-3 最小系统实物图
配上各种模块后的实物图如下所示:
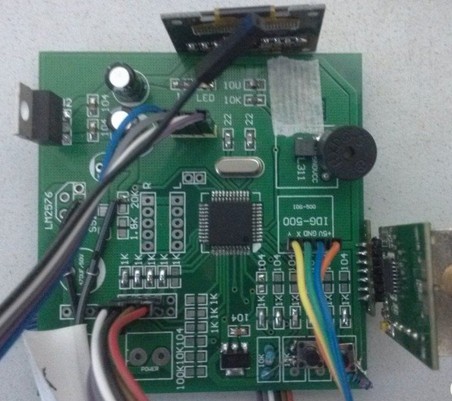
图3-4 总的实物图
2、软件设计
软件设计主要分为两个部分:上位机和下位机。下位机的工作主要是在规定的采样周期内采集输液的重量,经过算法计算得到输液剩余时间,然后通过OLED显示及通过无线模块发送到上位机。
而上位机的工作主要是收集下位机发送的数据,将数据分类并排序,最后在界面上显示出来。
2.1 下位机软件设计
下位机的程序先经过各方面的初始化(包括定时器、串口、称重传感器的去皮等),然后等待1s采样时间的到来。当1s采样周期到来时,单片机通过HX711采集输液的重量,对于真实的数据进行处理,不符合的抛弃。以下是其程序流程图:
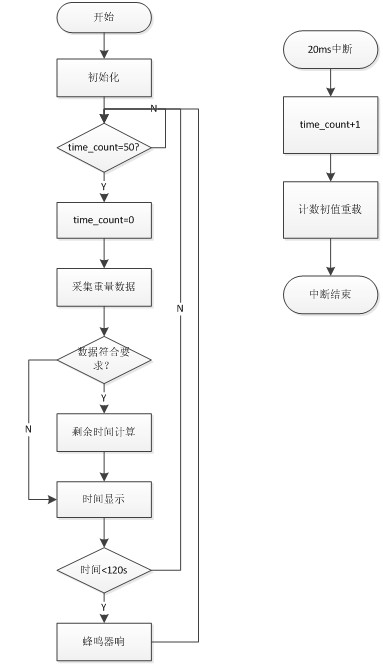
图3-5 下位机程序框图
2.2 上位机程序设计
上位机经过初始化,打开特定通讯端口,创建连接后,就等待着下位机发送数据。当上位机收到数据后,判断数据是否符合通讯协议的规定(通讯协议为:A5+ID+AA+剩余时间),符合进行排序并显示;不符合则抛弃。其软件流程图如下所示:

图3-6 上位机软件流程图
四、测试结果
我们的程序调试完毕后,用医用输液瓶进行测量,测量的结果如下表所示:
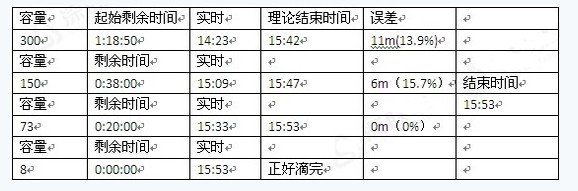
表4-1 实验测量结果
从上表上的数据可以看出,在短时间内的误差几乎为0,而在较长时间上有所不足,在我们的实验上误差最大为15.7%,但其实际上偏差的分钟数并不算很多(最多为11分钟),这在实际使用当中依然能让人接受。
五、总结
本方案是以深联华单片机芯片为核心,通过相应的传感器和无线模块,将病人当前输液时间信息实时的反馈给院方和病人的一个效率解决方案。针对当前医院输液混乱的现实情况,本着以病人为核心,以医院工作效率为重点而提出的这个输液时间监控解决方案解决了输液时间这个长期存在但并未正确解决的问题,使医院输液秩序得到有效的维护,并解决了病人在无法获知时间的焦急感。而且在实际测量中,其结果能让人满意。本方案设计产品精巧,有效,成本低廉,同时后期可扩展的可能性大,可大面积的在医院推广使用。
- 基于DSP和CPLD的低压断路器智能控制系统的设计(02-16)
- 车窗智能控制系统CAN总线技术搭建原理(11-22)
- DIY你的智慧家庭:基于物联网的老火靓汤煲智能控制系统解决方案,软硬件架构(05-26)
- 采用CAN总线的轿车车窗智能控制系统实现原理(01-11)
- 交通灯智能控制系统设计(07-09)
- 基于DDC楼宇智能控制系统的设计(12-14)