车窗智能控制系统CAN总线技术搭建原理
现在各中高档轿车都安装有电动车窗,按钮控制车窗玻璃的升降。如果车窗无智能,司机在没有注意到乘客的手或物体伸出窗口的情况下按下按钮,乘客容易被车窗夹伤。为了安全,很多乘车都采用电动防夹车窗。在充分研究有关CAN总线在汽车电子系统中的应用和电动车窗防夹方案的基础上,提出一种基于CAN总线的轿车车窗智能控制系统的设计方案,实现车窗在正常工作模式下防夹控制功能和紧急情况下(异常工作模式)快速升降车窗控制功能。
系统功能结构
1.CAN总线通信实现原理
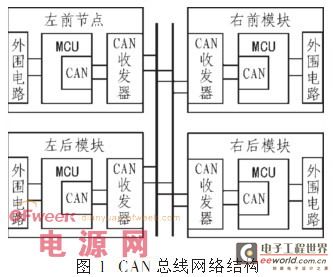
CAN总线属于多路复用总线的一种,最早是由德国Bosch公司研制的主要用于汽车电器系统控制的总线规范。它采用非破坏总线仲裁技术,多主方式工作。直接通信距离最远可达10km,通信速率最高可达1Mb/s,帧消息采用CRC校验和其他检错措施,具有自动关闭错误严重的节点功能。CAN节点通过报文的标识符滤波实现数据传输,不同优先级满足不同实时要求,节点数取决于总线驱动电路,通信介质可为双绞线、同轴电缆或光纤,选择灵活。报文采用短帧结构,传输时间短,受干扰概率低,保证数据出错率极低。汽车网络系统中的总线以报文为单位传输数据,节点对总线的访问采用位仲裁方式。报文起始发送节点标识符分为功能标识符和地址标识符。CAN总线系统节点分为不带微控制器的非智能节点和带微控制器的智能节点。该系统采用智能节点设计,轿车车窗按CAN总线结构和电器元件在汽车中的物理位置划分为左前、右前、左后和右后4个节点单元。其中左前节点为主控制单元,除负责本地(左前)车窗的升降,还可以远程控制其他车窗。
2.车窗的智能控制
电动车窗系统每个车门都有一个车窗玻璃升降机构,与传统的手摇机构相似,只不过是采用直流永磁电机驱动。电机尺寸非常小,可以安装在车门里面,并且带有一套减速机构,用来增加输出扭矩、减小输出转速。电机转动方向(即车窗的上下移动)通过改变输入电压的极性来实现,车窗升降速度取决于输入电压的大小。
系统使用一个小阻值(约1Ω)的电阻作为电流传感器,传感电阻与电机串联,其压降与电机的工作电流成正比,通过检测电阻两端的电压检测流过电机的电流。在传感电阻上的电压未到达设定的阈值前,电机一直工作,一旦传感器的压降达到阈值。电机停止转动,检测车窗位置。如果车窗位置未达到最终位置。说明车窗遇到障碍,车窗将自动退回初始位置。如果车窗到达行程终点,电机电路断开。为了完成该操作控制,需要实时控制车窗位置,为此在车窗导轨的顶部和底部各安装压电传感器,根据压力产生的电压来判断车窗是否到达预先设的极限位置。
该系统设计除了在正常情况下实现自动防夹功能,还要求在突发事件(如歹徒抢劫或乘客遇险逃生等)时司机能够控制车窗的强制关闭或打开。系统对每个节点单元都有3个用于车窗控制的按键(K1、K2和K3)。其中Kl用于控制车窗的上升和下降,是一个2值信号开关;K2暂停/恢复按键用于车窗上升或下降途中的暂停,再次按下K2将继续运动;K3模式选择按键,其默认为执行正常工作模式(带防夹功能),按下K3后执行异常工作模式(不带防夹功能),具有最高优先级,用于快速设定车窗上升或下降。主控节点单元即左前节点单元,除负责本地车窗的升降外,还控制所有节点单元的车窗同步动作,在前3个控制按键基础上,增加了本地/全局控制模式按键K4,默认为本地控制模式,按键后切换控制模式。

系统硬件设计
系统左前节点单元除具有全局控制外,其余节点单元只负责控制本地车窗,硬件设计仅多一个按键K4,主要在于软件设计。该系统设计的控制电路不仅支持节点单元间的CAN总线通信,还要检测压电传感器和负载电流等模拟量,判断各种逻辑,通过驱动器实现控制功能。
该系统采用片内含有CAN控制器的P8xC591作为节点单元主控制器。P8xC591采用强大的80C51指令集;内部集成有SJAl000CAN控制器的PeliCAN功能;全静态内核提供了扩展的节电方式:振荡器停止和恢复而不丢失数据;改进的1:l内部时钟分频器在12MHz外部时钟频率时实现500ns指令周期。
控制器P8xC2591读取按键信息,驱动车窗电机按预先编制的软件指令运行,同时监测
车窗智能控制系统CAN总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)