车窗智能控制系统CAN总线技术搭建原理
传感器的输出电压和负载电流,作为车窗在上升(下降)过程中与障碍物夹持时的逻辑判断,然后驱动电机。为了防止车窗玻璃上升到顶部或下降到底部时,电动机受到冲击堵转而降低电动车窗机械的使用寿命,该系统设计具有软停止功能,并且手动或自动上升、下降时都有此功能。当玻璃上升(下降)快到顶(底)部时,在上升软停止点切断电动机的电源使其停止工作,通过电动机的惯性使玻璃上升(下降)到顶(底)部。
各节点单元相关命令和状态通过CAN控制器以报文格式由CAN总线完成与其他节点单元信息间的传输和共享。
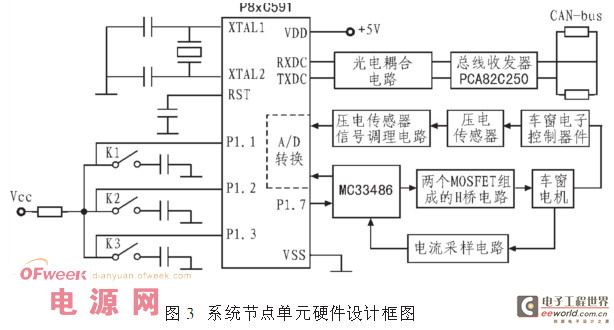
电机驱动电路采用汽车电子专用的电机驱动器MC33486。该器件带有两个双高端开关和两个预驱动低端开关,其低端开关可外接两个MOSFET管,可连续输出10A的电流。同时能够采集电机电流,利用它反馈给单片机A/D转换采样模块得到电机电流值,完成电机控制,实现车窗堵转和防夹功能。系统通过滤波电容降低噪声的耦合,收发器PCA82C250与CAN总线之间加接光电隔离器6N137,采用DC—DC变换器隔离电源,总线两端接终端电阻以消除反射信号。
系统软件设计
系统软件设计目主要包括CAN控制器初始化、节点发送接收报文和主控程序3个模块。
1.CAN控制器初始化
CAN控制器上电或硬件复位后必须初始化,包括操作模式、验收滤波器、总线位定时、中断和配置TXDC输出引脚。

2.节点发送/接收报文
报文的发送由CAN控制器遵循CAN协议规范自动完成。首先CPU必须将待发送的数据按特定格式组合成一帧报文,进入CAN控制发送缓冲器中,并置位命令寄存器中的发送请求标志,发送处理可通过中断请求或查询状态标志进行控制。其发送程序分发送远程帧和数据帧两种,远程帧无数据场。
报文的接收程序负责节点报文的接收以及总线关闭、错误报警、接收溢出等其他情况处理。报文的收发主要有中断接收方式和查询接收方式。软件设计采用报文接收的查询中断控制方式和报文发送的中断控制方式。
3.主控程序
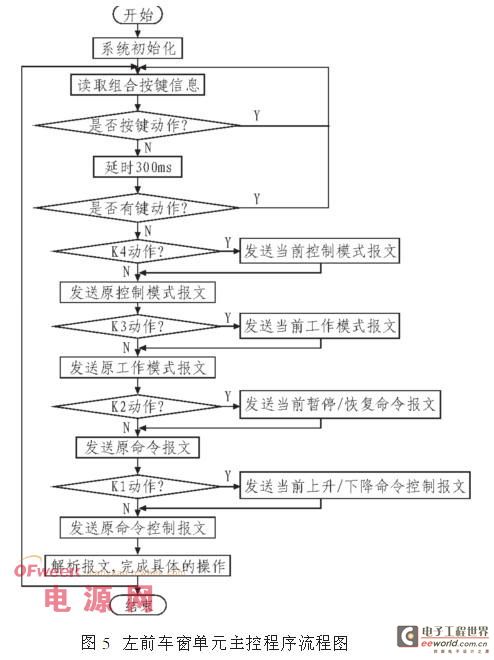
在各车窗节点单元中,左前节点单元功能最复杂,具有最高控制优先权。这里以左前节点单元为例,详细介绍其主控程序设计。首先初始化系统,包括P8xC591控制器的CAN模块初始化、中断、I/0端口、定时模块、看门狗模块、A/D转换器模块和设置全局变量,还要将电机堵转时的最大电流和车窗到顶(底)时传感器的电压阈值写入EPROM。P8xC591将实测电流与EPROM中的标定值比较,实现防夹功能,比较电压阈值与测得的传感器电路电压值判断车窗到达极限位置。初始化完成后,读取组合按键信息,根据按键动作实施具体操作,同时发送CAN报文,完成各节点单元间的CAN通信和智能化控制。
系统主要技术参数和功能
电动车窗控制系统除了具有车窗自动上升、下降和手动暂停、恢复功能外,还有以下功能:
(1)防夹功能初始化后,手动和自动上升时都具有防夹功能,防夹次数不受限制;从车窗上极限下沿40mm往下,车窗上极限上沿40mm往上的区间为防夹区间:在室温(22±5)℃、80mΩ的线间电阻、15V的工作电压,以10N/mm的测量仪测量时,玻璃上升的防夹力小于100N。
(2)省电模式在输入信号消失120ms后。且电动机温度接近室温25℃时,系统自动进入省电模式.静态电流小于300μA。当电动机控制单元一旦得到输入指令就被唤醒。
(3)软停止功能上升软停止点为上极限位置约2mm处,下降软停止点为下极限位置上约12mm处。
(4)电动机保护功能对电动机采取保护措施,提高电动机和电动车窗系统的使用寿命。在电动机堵转的250ms内,控制单元切断电动机电源,电动机停止工作。在控制单元接通电源后,如果没有初始化,则电动机的初始温度定为80℃;如果初始化,则电动机初始温度定为160~C。正常情况下,如果电动机温度达到170℃,则输入的指令无效,一旦电动机温度降低后就恢复功能;如果电动机温度到190℃,则立即停止电动机的工作,一旦电动机温度降低后就恢复功能。
(5)自诊断保护功能为保证系统的可靠性,同时提高系统的平均无故障时间,采用自诊断保护措施:如果电源电压超过16V±0.5V,关闭自动上升功能。
(6)系统抗干扰设计技术软件抗干扰以其设计灵活、节省硬件资源、成本低等优势得到广泛应用。该系统的软件设计嵌入看门狗,进一步提高系统的可靠性。
设计了基于CAN总线的轿车车窗智能控制系统,节点单元以P8xC591单片机为核心,将车窗电机和电子控制元件接入系统。采用CAN总线传输、共享和查询数据,实现分布式控制。与传统汽车电器手动操作和点对点式互联方式相比.采用CAN总线技术,布线明显减少,车身系统结构简单
车窗智能控制系统CAN总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)