步进电机控制的微波频率自动测量电路设计

5.信号源输出频率测量实验结果及分析
为了在上位机的LabVIEW界面得到所测量的微波信号频率,需在界面中显示出检波电流--频率曲线,从而可明显读出检波电流的“吸收波谷点”.需通过定标法先手工测量频率--距离(当前测量点与起始点的距离,可由套筒刻度算出)的一组尽可能多的数据点,然后利用步进电机每走一步的距离,就可以把距离转化为步数,再用matlab拟合出频率--步数的关系函数。从而可知道步进电机走到哪一步对应哪一个频率。电机走完全程需要1854步,那么把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标。
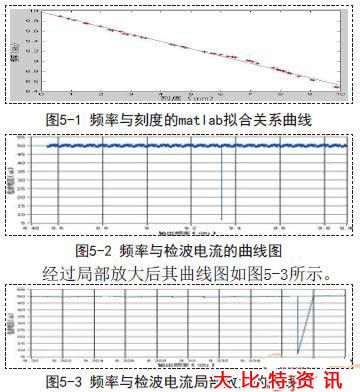
限于本信号源频率及谐振式频率计测量范围的影响,本系统只能在8.48GHz和9.9GHz范围内测量。因此从套筒的起始位置9.9mm(对应于频率8 . 4 8 G H z ),截止位置0 . 6 3 m m (对应于频率9.9GHz),其全长为9.9mm-0.63mm=9.27mm.由于电机带动套筒每步的距离非常小,因此不能直接测量步进电机一步的距离,利用步进电机没有累计误差的特点,采用步进电机走动180步,测出套筒刻度前后位置差,得出步进电机带动套筒每一步移动平均距离为0.005mm.手工测出频率与刻度的42组数据点,利用MATLAB拟合出图5-1所示曲线。用MATLAB拟合出频率f 与刻度L 线性关系函数为f = ?0.1456* L + 9.9917(0.63mm ≤ L ≤ 9.9mm)。由于电机每步带动套筒移动0.005mm,起始位置在0.63mm,即步进电机走一步后,套筒的位置在0.63mm+0.005mm=0.635mm,而步进电机走完全程需要1854步,套筒的截止位置在0.63+0.005*1854=9.9mm.则刻度L 与步数n 的关系函数为L = 0.005n + 0.63(0 ≤ n ≤1854)。
可推导出频率f 与步数n的函数关系式为f = ?0.000728n + 9.9(0 ≤ n ≤1854)。把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标,利用PC机在LabVIEW描绘的波形图如图5-2所示。
再由LabVIEW自动计算检波电流最小值对应的频率值,如图5-4所示。可知这时信号源输出频率为9.337GHz.

与手工测量做对比。换上可直接测出频率的谐振式频率计,测得这时的频率为9.357GHz,所以自动测量与手动测量的相对误差为:

本系统设定步进电机走完全程需要82.4秒,不能设得走太快的原因是防止步进电机“丢步”(漏掉了脉冲没有运动到指定的位置)。另外太快很可能检测不到检波电流的“波谷点”.而手工测量一次信号源的输出频率,通常要两分多钟,可见本系统自动测量的实用性。
步进电机控制微波频率自动测 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)