步进电机控制的微波频率自动测量电路设计
3.3.2 步进电机及自动控制电路
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当$步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可通过控制脉冲频率来控制电机转动的速度,达到调速的目的。
本系统采用$二相步进电机,具有如下一些特点:只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可实现电机的转动方向;步进角为1.8°的两相四线混合式步进电机,并把细分驱动器的细分数设置为8,电机的运转分辨率为每个脉冲0.225°。为了有效驱动电机,本文采用了基于TA8435H芯片的驱动电路。实际应用电路如下图3-2所示,芯片的输入信号有使能控制、正反转控制和时钟输入。
通过光耦器件TLP521可将驱动芯片跟输入级进行电隔离,起到逻辑电平隔离和保护作用。
M1,M2分别接高电平,所以为1/8细分方式。
由于REF IN引脚接高电平,因此VNF为0.8V.
输出级斩波电流为VNF/RNF=0.8/0.8=1A,因此R212、R213要选用功率大一些的电阻。选用不同的二相步进电机时,应根据其电流大小选择合适的R212和R213.R21和C5组成复位电路,D1~D4快恢复二极管可用来泄放绕组电流。
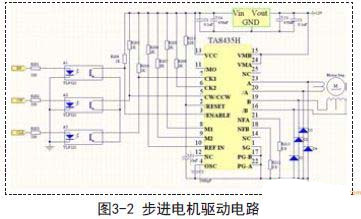
电路中用到微处理器S3C44B0引脚PC0,PC1,PC2给驱动电路分别输出使能,正反转,时钟信号,通过控制输出脉冲的间隔可以控制电机转动的速率,而输出脉冲个数可控制步进电机走动的步数,达到控制频率计腔体位置目的。电路输出端口A, A, B, B接二相步进电机对应输入端子。
3.3.3 检波电流I/V转换及放大电路
检波晶体的作用是将微波微弱信号转换成直流信号。故可观察检波电流是否出现“吸收波谷”来判断腔体是否到达谐振位置。本系统将检波电流经过处理之后传送到上位机的LabVIEW界面显示,观察是否到谐振位置。

由于微波信号在传输过程中受到外部干扰的噪声,线路的噪声,元器件的噪声等等,因此需要滤波电路来滤除这些干扰信号。由于处理器对信号的采集速率比较低,所以本系统采用了时间常数比较大的由R418
步进电机控制微波频率自动测 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)