移植ucosII到STM32F103ZE(五)
时间:11-25
来源:互联网
点击:
os_cpu_a.asm
这个文件包含着必须用汇编写的代码。
申明这些变量是在其他文件定义的,本文件只做引用(有几个好像并未引用,不过没有关系)。
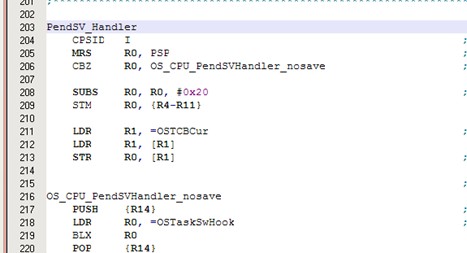
替换后的 PPendSV中断
声明这些函数是在本文件中定义的。EXPORT这个关键字是跟编译器有关的,能被keil识别,但不能被IAR 识别。
NVIC_INT_CTTRL
NVIC_SYSPRI14
NVIC_PENDSV_PRI
NVIC_PENDSVSET
S_CPU_SR_Save
OS_CPU_SR_Restore
OSStartHighRdy()由 OSStart()调用,用来启动最高优先级任务,当然任务必须在OSStart()前已被创建。
OSStartHighRdy
OSStartHang
void
{
# if
#endif
OS_ENTER_CRITICAL();
#if OS_TASK_PROFILE_EN > 0
#endif
}
OSCtxSw
OSIntExit()对调用 OSIntCtxSw()做任务切换。
OSIntCtxSw
OSIntCtxSw()则是中断退出时,由中断状态切换到另一个任务。由中断切换到任务时,CPU 寄存器入栈的工作已经做完了,所以无需做第二次了(参考邵老师书的 3.10 节)。这里只不过由于 CM3 的特殊机制导致了在这两个函数中只要做触发 PendSV中断即可,具体切换由 PendSV 中断来处理。
OS_CPU_PendSVHandler()
{
}
OS_CPU_PendSVHandler
OS_CPU_PendSVHandler_nosave
#0 OS_CPU_PendSVHandler 要替换为 PendSV_Handler。
os_dbg.c
Cortex-M3 权威指南>>。
App.c
App.c文件中建立如下函数
os_cfg.h 是用来配置 ucosii 系统的,对其做如下修改:
#define
#define
#define
#define
#define
#define
#define
#define
#define
再做开启。
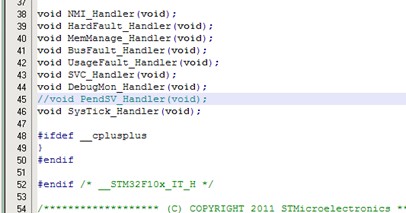
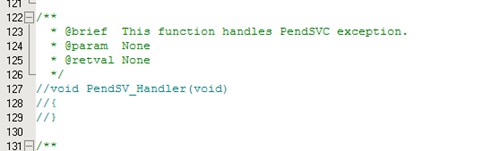
最后,还要记得把stm32f10x_it.h文件中的void PendSV_Handler(void);注释掉,以防和 OS_CPU.HH
文件中的声明冲突,stm32f10x_it.c 中的相应函数体也得注释掉。如图:
这个文件包含着必须用汇编写的代码。
申明这些变量是在其他文件定义的,本文件只做引用(有几个好像并未引用,不过没有关系)。
替换后的 PPendSV中断
声明这些函数是在本文件中定义的。EXPORT这个关键字是跟编译器有关的,能被keil识别,但不能被IAR 识别。
NVIC_INT_CTTRL
NVIC_SYSPRI14
NVIC_PENDSV_PRI
NVIC_PENDSVSET
S_CPU_SR_Save
OS_CPU_SR_Restore
OSStartHighRdy()由 OSStart()调用,用来启动最高优先级任务,当然任务必须在OSStart()前已被创建。
OSStartHighRdy
OSStartHang
void
{
# if
#endif
OS_ENTER_CRITICAL();
#if OS_TASK_PROFILE_EN > 0
#endif
}
OSCtxSw
OSIntExit()对调用 OSIntCtxSw()做任务切换。
OSIntCtxSw
OSIntCtxSw()则是中断退出时,由中断状态切换到另一个任务。由中断切换到任务时,CPU 寄存器入栈的工作已经做完了,所以无需做第二次了(参考邵老师书的 3.10 节)。这里只不过由于 CM3 的特殊机制导致了在这两个函数中只要做触发 PendSV中断即可,具体切换由 PendSV 中断来处理。
OS_CPU_PendSVHandler()
{
}
OS_CPU_PendSVHandler
OS_CPU_PendSVHandler_nosave
#0 OS_CPU_PendSVHandler 要替换为 PendSV_Handler。
os_dbg.c
Cortex-M3 权威指南>>。
App.c
App.c文件中建立如下函数
os_cfg.h 是用来配置 ucosii 系统的,对其做如下修改:
#define
#define
#define
#define
#define
#define
#define
#define
#define
再做开启。
最后,还要记得把stm32f10x_it.h文件中的void PendSV_Handler(void);注释掉,以防和 OS_CPU.HH
文件中的声明冲突,stm32f10x_it.c 中的相应函数体也得注释掉。如图:
移植ucosIISTM32F103Z 相关文章:
- 移植ucosII到STM32F103ZE(四)(11-25)
- 移植ucosII到STM32F103ZE(一)(11-25)
- 移植ucosII到STM32F103ZE(二)(11-25)
- 移植ucosII到STM32F103ZE(六)(11-25)
- 移植ucosII到STM32F103ZE(三)(11-25)
- 移植ucosII到STM32F103ZE(七)(11-25)