移植ucosII到STM32F103ZE(四)
时间:11-25
来源:互联网
点击:
a)
根据AN-1018.pdf 和移植详解介绍的移植基础知识,对OS-uCOSIIport 下的代码解释下。
并进行相关特性修改。
os_cpu.h
#ifdef
#define
#else
#define
#endif
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
因为 CM3 是32 位宽的,所以 OS_STK(堆栈的数据类型)被类型重定义为 unsigned int。
因为 CM3 的状态寄存器(xPSR)是32位宽的,因此 OS_CPU_SR 被类型重定义为 unsigned int。
OS_CPU_SR 是在OS_CRITICAL_METHOD 方法 3 中保存 cpu 状态寄存器用的。在 CM3 中,移植OS_ENTER_CRITICAL(),OS_EXIT_CRITICAL()选方法 3 是最合适的。
#define
#if
#endif
具体定义宏OS_ENTER_CRITICAL() 和OS_EXIT_CRITICAL()其中OS_CPU_SR_Save() 和OS_CPU_SR_Restore()是用汇编代码写的,代码在 os_cpu_a.asm 中,到时再解释。
#define
CM3 中,栈是由高地址向低地址增长的,因此 OS_STK_GROWTH定义为 1。
#define OS_TASK_SW()
定义任务切换宏,OSCtxSw()是用汇编代码写的,代码在 os_cpu_a.asm 中,到时再解释。
#if OS_CRITICAL_METHOD
#endif
void
void
void
void
void
void
INT32U
声明几个函数,OS_CPU_PendSVHandler(void)要替换为 PendSV__Handler(void)。另外这里最后三个函数需要注释掉,为什么呢?
答案就在启动文件上,一般我们自己开发基于 stm32 芯片的软件,都会使用标准外设库 CMSIS 中提供的启动文件,比如 startup_stm32f10x_hd.s,而 Micrium官方没有用 ST 的标准启动文件,自写了启动文件,而且分开写成了两个.s 文件,即 init.s,vectors.s
(MicriumSoftwareEvalBoardsSTSTM3210B-EVALRVMDK)。init.s 负责进入 main(),vectors.s设置中断向量。OS_CPU_SysTickHandler和OS_CPU_PendSVHandler 这两个中断向量就是在 vectors.s 中被设置的。
接下来就该处理 SysTick 中断和启动任务了。SysTick是 OS 的“心跳”,可称为滴答时钟,本质上来说就是一个定时器。
把 OS_CPU_C.C 文件中的 void OS_CPU_SysTickHandler (void)的内容代码复制到 stm32f10x_it.c
文件中的 SysTick_Handler (void)函数内;

这样子,替换后的 SysTick_Handler (void)函数在 stm32f10x_it.h 文件中声明,在stm32f10x_it.c
中有具体代码,在startup_stm32f100x_hd.s中有向量地址;同时需要在App文件中有对 SysTick的初始化函数(后面编写App.c时需要初始化)。
整个过程中 ST 官方标准启动文件啥也没动,防止了误修改。
OS_CPU_SysTickHandler()定义在 os_cpu_c.c 中,是 SysTick中断的中断处理函数,而 stm32f10x_it.c 中已经有该中断函数的定义 SysTick_Handler()),这里也就不需要了。
OS_CPU_SysTickInit() 定义在os_cpu_c.c中,用于初始化SysTick定时器,它依赖于 OS_CPU_SysTickClkFreq(),而此函数我们自己会实现,所以注释掉。
os_cpu_c.c
OSInitHookBegin()
OSInitHookEnd()
OSTaskCreateHook()
OSTaskDelHook()
OSTaskIdleHook()
OSTaskStatHook()
OSTaskStkInit()
OSTaskSwHook()
OSTCBInitHook()
OSTimeTickHook()
这些函数除了 OSTaskStkInit(),都是一些 hook 函数。这些 hook 函数如果不使能的话,都不会用上,也都比较简单,看看就应该明白了,所以就不介绍。
下面就说一说 OSTaskStkInit()。说之前还是得先说一下任务切换,因为初始化任务堆栈,是为任务切换服务的。代码在正常运行时,一行一行往下执行,怎么才能跑到另一个任务(即函数)执行呢?首先大家可以回想一下中断过程,当中断发生时,原来函数执行的地方(程序计数器PC、处理器状态寄存器及所有通用寄存器,即当前代码的现场)被保存到栈里面去了,然后开始取中断向量,跑到中断函数里面执行。执行完了呢,想回到原来函数执行的地方,该怎么办呢,只要把栈中保存的原来函数执行的信息恢复即可(把栈中保存的代码现场重新赋给 cpu 的各个寄存器),一切就都回去了,好像什么事都没发生一样。这个过程大家应该都比较熟悉,任务切换和这有什么关系,试想一下,如果有 3 个函数 foo1(), foo2(), foo3() 都像是刚被中断,现场保存到栈里面去了,而中断返回时做点手脚(调度程序的作用),想回哪个回哪个,是不是就做了函数(任务)切换了。看到这里应该有点明白 OSTaskStkInit()的作用了吧,它被任务创建函数调用,所以要在开始时,在栈中作出该任务好像刚被中断一样的假象。(关于任务切换的原理邵老师书中的 3.06 节有介绍)。
那么中断后栈中是个什么情形呢,<>中 9.1.1 有介绍,xPSR,PC,LR,R12,R3-R0 被自动保存到栈中的,R11-R4如果需要保存,只能手工保存。因此 OSTaskStkInit()的工作就是在任务自己的栈中保存 cpu 的所有寄存器。这些值里 R1-R12 都没什么意义,这里用相应的数字代号(如 R1 用0x01010101)主要是方便调试。
OS_STK *OSTaskStkInit (void (*task)(void
{
OS_STK
(void)opt;
stk
*(stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
return (stk);
}
xPSR = 0x01000000L,xPSR T 位(第24 位)置 1,否则第一次执行任务时 Fault,
PC 肯定得指向任务入口,
R14 = 0xFFFFFFFEL,最低4位为E,是一个非法值,主要目的是不让使用 R14,即任务是不能返回的。R0 用于传递任务函数的参数,因此等于 p_arg。
把 OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()这两个函数的内容代码注释掉。
os_cpu_c.c文件中的
#define
#define
#define
#define
#define
#define
#define
#define
把上面这些宏定义也注释掉,因为它们都用于 OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()。

根据AN-1018.pdf 和移植详解介绍的移植基础知识,对OS-uCOSIIport 下的代码解释下。
并进行相关特性修改。
os_cpu.h
#ifdef
#define
#else
#define
#endif
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
typedef
因为 CM3 是32 位宽的,所以 OS_STK(堆栈的数据类型)被类型重定义为 unsigned int。
因为 CM3 的状态寄存器(xPSR)是32位宽的,因此 OS_CPU_SR 被类型重定义为 unsigned int。
OS_CPU_SR 是在OS_CRITICAL_METHOD 方法 3 中保存 cpu 状态寄存器用的。在 CM3 中,移植OS_ENTER_CRITICAL(),OS_EXIT_CRITICAL()选方法 3 是最合适的。
#define
#if
#endif
具体定义宏OS_ENTER_CRITICAL() 和OS_EXIT_CRITICAL()其中OS_CPU_SR_Save() 和OS_CPU_SR_Restore()是用汇编代码写的,代码在 os_cpu_a.asm 中,到时再解释。
#define
CM3 中,栈是由高地址向低地址增长的,因此 OS_STK_GROWTH定义为 1。
#define OS_TASK_SW()
定义任务切换宏,OSCtxSw()是用汇编代码写的,代码在 os_cpu_a.asm 中,到时再解释。
#if OS_CRITICAL_METHOD
#endif
void
void
void
void
void
void
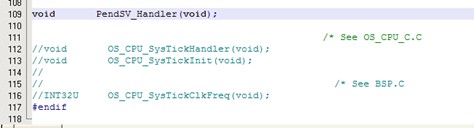
INT32U
声明几个函数,OS_CPU_PendSVHandler(void)要替换为 PendSV__Handler(void)。另外这里最后三个函数需要注释掉,为什么呢?
答案就在启动文件上,一般我们自己开发基于 stm32 芯片的软件,都会使用标准外设库 CMSIS 中提供的启动文件,比如 startup_stm32f10x_hd.s,而 Micrium官方没有用 ST 的标准启动文件,自写了启动文件,而且分开写成了两个.s 文件,即 init.s,vectors.s
(MicriumSoftwareEvalBoardsSTSTM3210B-EVALRVMDK)。init.s 负责进入 main(),vectors.s设置中断向量。OS_CPU_SysTickHandler和OS_CPU_PendSVHandler 这两个中断向量就是在 vectors.s 中被设置的。
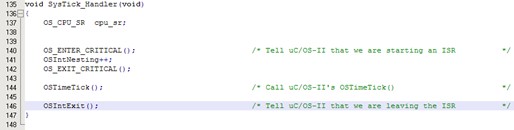
接下来就该处理 SysTick 中断和启动任务了。SysTick是 OS 的“心跳”,可称为滴答时钟,本质上来说就是一个定时器。
把 OS_CPU_C.C 文件中的 void OS_CPU_SysTickHandler (void)的内容代码复制到 stm32f10x_it.c
文件中的 SysTick_Handler (void)函数内;
这样子,替换后的 SysTick_Handler (void)函数在 stm32f10x_it.h 文件中声明,在stm32f10x_it.c
中有具体代码,在startup_stm32f100x_hd.s中有向量地址;同时需要在App文件中有对 SysTick的初始化函数(后面编写App.c时需要初始化)。
整个过程中 ST 官方标准启动文件啥也没动,防止了误修改。
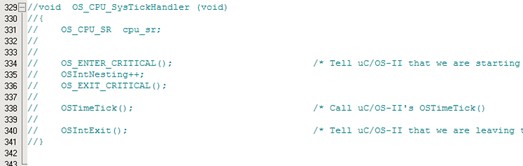
OS_CPU_SysTickHandler()定义在 os_cpu_c.c 中,是 SysTick中断的中断处理函数,而 stm32f10x_it.c 中已经有该中断函数的定义 SysTick_Handler()),这里也就不需要了。
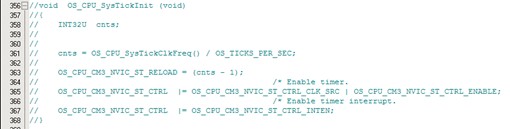
OS_CPU_SysTickInit() 定义在os_cpu_c.c中,用于初始化SysTick定时器,它依赖于 OS_CPU_SysTickClkFreq(),而此函数我们自己会实现,所以注释掉。
os_cpu_c.c
OSInitHookBegin()
OSInitHookEnd()
OSTaskCreateHook()
OSTaskDelHook()
OSTaskIdleHook()
OSTaskStatHook()
OSTaskStkInit()
OSTaskSwHook()
OSTCBInitHook()
OSTimeTickHook()
这些函数除了 OSTaskStkInit(),都是一些 hook 函数。这些 hook 函数如果不使能的话,都不会用上,也都比较简单,看看就应该明白了,所以就不介绍。
下面就说一说 OSTaskStkInit()。说之前还是得先说一下任务切换,因为初始化任务堆栈,是为任务切换服务的。代码在正常运行时,一行一行往下执行,怎么才能跑到另一个任务(即函数)执行呢?首先大家可以回想一下中断过程,当中断发生时,原来函数执行的地方(程序计数器PC、处理器状态寄存器及所有通用寄存器,即当前代码的现场)被保存到栈里面去了,然后开始取中断向量,跑到中断函数里面执行。执行完了呢,想回到原来函数执行的地方,该怎么办呢,只要把栈中保存的原来函数执行的信息恢复即可(把栈中保存的代码现场重新赋给 cpu 的各个寄存器),一切就都回去了,好像什么事都没发生一样。这个过程大家应该都比较熟悉,任务切换和这有什么关系,试想一下,如果有 3 个函数 foo1(), foo2(), foo3() 都像是刚被中断,现场保存到栈里面去了,而中断返回时做点手脚(调度程序的作用),想回哪个回哪个,是不是就做了函数(任务)切换了。看到这里应该有点明白 OSTaskStkInit()的作用了吧,它被任务创建函数调用,所以要在开始时,在栈中作出该任务好像刚被中断一样的假象。(关于任务切换的原理邵老师书中的 3.06 节有介绍)。
那么中断后栈中是个什么情形呢,<>中 9.1.1 有介绍,xPSR,PC,LR,R12,R3-R0 被自动保存到栈中的,R11-R4如果需要保存,只能手工保存。因此 OSTaskStkInit()的工作就是在任务自己的栈中保存 cpu 的所有寄存器。这些值里 R1-R12 都没什么意义,这里用相应的数字代号(如 R1 用0x01010101)主要是方便调试。
OS_STK *OSTaskStkInit (void (*task)(void
{
OS_STK
(void)opt;
stk
*(stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
*(--stk)
return (stk);
}
xPSR = 0x01000000L,xPSR T 位(第24 位)置 1,否则第一次执行任务时 Fault,
PC 肯定得指向任务入口,
R14 = 0xFFFFFFFEL,最低4位为E,是一个非法值,主要目的是不让使用 R14,即任务是不能返回的。R0 用于传递任务函数的参数,因此等于 p_arg。
把 OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()这两个函数的内容代码注释掉。
os_cpu_c.c文件中的
#define
#define
#define
#define
#define
#define
#define
#define
把上面这些宏定义也注释掉,因为它们都用于 OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()。
移植ucosIISTM32F103Z 相关文章:
- 移植ucosII到STM32F103ZE(一)(11-25)
- 移植ucosII到STM32F103ZE(二)(11-25)
- 移植ucosII到STM32F103ZE(五)(11-25)
- 移植ucosII到STM32F103ZE(六)(11-25)
- 移植ucosII到STM32F103ZE(三)(11-25)
- 移植ucosII到STM32F103ZE(七)(11-25)