FTM的PWM、输入捕获、正交解码
要想搞清楚FTM模块,首先我们要介绍几个重要的寄存器给大家,他们就像小伙伴一样,好好利用可以帮大忙呢。
- FTMx_CNT小朋友(计数器寄存器),他负责喊号(计数)。
- FTMx_SC小朋友(状态和控制寄存器),他负责……寄存器名字面意思,具体说就是决定CNT小朋友的喊号的快慢(计数频率,包括时钟源的选择和分频系数)。他还负责其他一些杂事,比如计数溢出、中断使能等等。
- FTMx_MOD小朋友(模数寄存器),他负责记住一个数字,当CNT小朋友喊道这个数字的时候,他就提醒相关人员干一些事情,比如产生溢出中断标志,比如让CNT重新开始喊号。
- FTMx_CNTIN小朋友(计数器初始值寄存器),他告诉CNT小朋友哪哪个数开始喊。
- 其中x代表不同的FTM模块的标号,比如MK60D系列单片机,有3个FTM模块,x就为0~2。
PWM输出功能
PWM工作原理
PWM是什么,能做什么用,不是我们要讲的,相信你也能百度到。这里我们主要讲PWM在Kinetis的FTM模块中是怎么工作的。还记得上面介绍的几个小朋友吗,他们只要一起干活,我们的PWM波就可以生成了,下面我来说说他们是怎么干活的。哦对了,说到PWM还有一个小朋友要介绍,就是FTMx_CnV(通道值寄存器)小朋友。其中n代表FTMx有n个这样的小朋友,对于FTM0模块来说,有8个。他们8个人负责PWM的脉宽(即占空比),他们每个人也会记住一个数字,当CNT喊道这个数字的时候,他就让PWM的输出产生上升或下降沿。
PWM最重要参数就是频率(周期的倒数)和占空比,下面的两个公式解释了他们是怎么确定的:
PWM的周期=(MOD–CNTIN +
PWM的占空比=(CnV − CNTIN)
怎么样,上面的公式结果都是由我们认识的小朋友决定的吧。下面我来解说下这个工作流程,首先公式中的计数器周期是SC小朋友决定的,前面说了他负责喊号的快慢,因为他负责决定采用哪个频率为输入频率,这些频率候选有系统时钟、固定频率时钟以及外部时钟,他还负责这些输入频率的分频系数,总之SC小朋友决定了计数器周期,也就是CNT小朋友喊号的快慢。然后CNT小朋友从CNTIN小朋友那里知道了要喊的第一个数,他按照SC决定的快慢一直喊道MOD告诉他的数,喊完这些数,一个PWM周期也就产生了!
那么PWM的脉宽是怎么决定的呢,首先假定CNT在喊第一个数的时候,PWM通道输出高电平,当CNT喊到CnV小朋友告诉他的号的时候,PWM输出通道就会变为低电平,直到CNT继续喊道MOD的时候一个PWM周期结束,当重新开始喊CNTIN的号的时候,PWM的输出通道又变为了高电平,这样持续下去,就产生了PWM波形!
你以为一个FTMx模块只能输出一路PWM就错了,我们刚才说了CnV根据x的不同,有n个通道可以输出PWM,如果是x=0,那么FTM0就有8个CnV,C0V到C7V这8个小朋友,因此FTM0可以输出8路不同占空比的PWM,但是由于负责喊号的CNT以及他的其他小伙伴在FTM0中仅仅各有1人,因此FTM0只能输出一种频率的PWM。
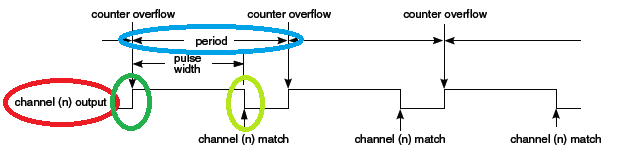 如果上面的描述让你和你的小伙伴都惊呆了,那么就看看上面这幅图,从技术文档中的Figure 39-181截出来的。红圈后面的波形就行PWM输出通道输出的波形。深绿色的圈代表CNT从CNTIN开始计数,此时输出高电平。当计数到CnV的时候,浅绿色圈处,产生channel(n)match通道匹配事件,变为低电平。当整个计数周期完成,即蓝圈的范围,CNT计数到MOD时,一个波形输出完成。
如果上面的描述让你和你的小伙伴都惊呆了,那么就看看上面这幅图,从技术文档中的Figure 39-181截出来的。红圈后面的波形就行PWM输出通道输出的波形。深绿色的圈代表CNT从CNTIN开始计数,此时输出高电平。当计数到CnV的时候,浅绿色圈处,产生channel(n)match通道匹配事件,变为低电平。当整个计数周期完成,即蓝圈的范围,CNT计数到MOD时,一个波形输出完成。
PWM例程讲解
前面讲了FTM中的几个小伙伴的故事,目的是为了让大家了解PWM的工作流程,下面我们来具体看看例程中,是如何利用库函数来生成PWM的。首先看例程“LPLD_ServoControl”,这是一个控制舵机转动的例程,我们知道舵机的控制PWM频率一般是50Hz,其他的舵机有可能不同,因
FTMPWM输入捕获正交解 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)