PRS-XY混联加工平台开放式数控系统
并联机床的结构和配置呈多样化形式,与传统机床在运动传递原理上有着本质的区别。在传统的机床中,各伺服轴的运动相互独立,刀具的运动量是各伺服轴运动量的线性组合。而在并联机床中,各伺服轴的运动相互祸合,刀具运动量是各伺服轴运动量的非线性映射。因此很难有一种控制系统能适合所有并联机床的要求,这就要求机床开发者自行配置控制硬件和软件,并要求并联机床的控制系统必须是开放结构以提高系统的适用性。
目前,比较现实的实现开放式数控系统的途径是PC+多轴运动控制器。在这种结构中,PC机处理非实时部分,实时控制部分由多轴运动控制器来承担,形成多级分布式控制模式。这样架构出来的数控系统既具有前端PC机的柔性,又具有专用CNC系统的稳定性和可靠性。
目前,在国内市场上,性能价格比较高的当属可编程多轴运动控制器(Program Multiple Axis Controller,PMAC)开放式控制系统。由于PMAC优异的轨迹跟踪能力和精度,在很多高性能的数控系统和研究项目中都选用它构建开放式控制系统。Turbo PMAC是PMAC系列的升级版本,保持了PMAC的优良性能,其特有的多种开放特性更适合于构建复杂的开放式数控系统。
1 PRS-XY混联机构描述
图1所示为新型的PRS一XY混联机构结构布局简图。
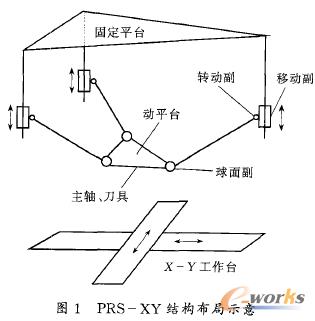

该机构由并联机构和串联机构两部分构成。上半部分为一个3自由度的PRS型并联机构,包括固定平台和动平台,固定平台和动平台之间通过3个定长杆件连接,每一杆件链包含移动副、转动副和球面副。3个移动副水平120°均匀分布在固定平台的立柱上,并由直线电机驱动。该机构的动平台具有一个平动自由度(Z轴)和2个旋转自由度(A,B轴)。下半部分为X-Y工作台,具有2个平动自由度(X,Y轴)。该混联机构为五轴运动加工平台,采用了串联驱动和并联驱动并用的混联驱动原理,兼有并联机床和传统机床的优点,克服了并联机床工作空间小的缺点,可应用于复杂型面零件的加工。
2 数控系统硬件的构成和特点
控制系统采用“PC+运动控制器”的开放模式,如图2所示。
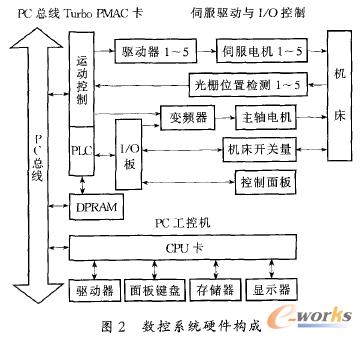
PC机选用研华AWS-2848VTP-体化工作站,运动控制器为美国Delta Tau公司的Turbo PMAC多轴运动控制卡。控制系统包含5套伺服驱动系统,分别用于并联机构的3组直线电机驱动和串联机构的2组交流伺服电机驱动。采用光栅尺进行位置检测。通过Turbo hMAC的5个伺服控制通道,实现5组伺服系统的闭环控制。利用Turbo PMAC的第6个伺服通道控制主轴电机变频器,实现主轴调速,以支持数控代码中的主轴速度指令。I/O板连接到Turbo PMAC上,通过内置的PLC功能控制机器的辅助功能设备,主轴启停,检测机床限位,驱动指示装置和报警装置,检测控制面板输人指令信号等。DPRAM为双端口存储器,用于实现PC机与Turbo PMAC之间的无需握手的高速数据通信,使数据传输更加流畅,保证机床的实时控制性能。
控制系统的特点是以PC总线工业控制计算机为控制核心,以PMAC多轴控制卡为运动控制模块,形成以PC机为上位机、Turbo PMAC多轴控制卡为下位机的分布式控制。
3 数控系统工作原理
图3为数控系统的工作流程,顺序由APT,PC,Turbo PMAC和伺服驱动系统4部分完成整个数控过程。
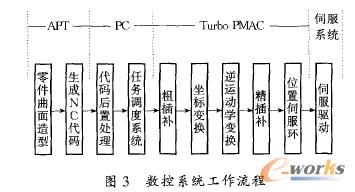
APT为自动编程工具,完成零件的曲面造型、轨迹规划和NC代码生成。可利用目前通用的CAD/CAM软件作为APT自动编程工具,典型的有UG和Pro/Engineer软件。对于APT生成的NC代码,需进行代码的后置处理,完成NC.代码的格式转换和语法规则检查,以适应五轴混联机床的NC代码控制。后置处理是专用模块,是面向该棍联机床专门开发的处理软件程序。
如前所述,并联机床的刀具在操作空间的运动是关节空间伺服运动的非线性映射,刀尖轨迹规划和编程在虚轴上进行,一般基于笛卡儿坐标,而实际驱动轴在并联杆系的节点上,是基于关节坐标的,它们之间的运动是非线性关系。因此,必须通过机构的逆运动学进行变换,将虚轴的规划量转换为实轴的控制量,该过程又称为虚实映射川。由于虚实变换很强的非线性性,为保证精度,在施行运动学变换前,还必须首先对规划轨迹(包括直线段)进行数据点密化,即在笛卡儿坐标空间中进行粗插
开放式数控系 相关文章:
- 基于光纤伺服总线的开放式数控系统(12-21)
- 水平下调式三辊卷板机开放式数控系统的开发(12-12)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)