BMW 总线系统详解
1、系统分析
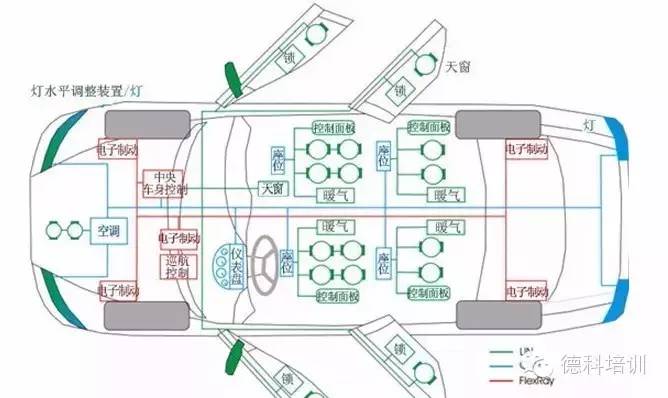
车辆中的电子控制单元通过一个网络相互连接。中央网关模块在这个系统网络中起重要作用。中央网关模块负责将信息从一个总线系统传递至另一个总线系统。发动机控制和底盘调节系统通过PT-CAN(或PT-CAN2)和FlexRay总线系统与ZOM连接。常用车辆电气系统的控制单元通过K-CAN和K-CAN2连接。对于信息和通信技术范围内的大部分控制单元来说在MOST用作信息载体使用。车辆诊断通过D-CAN连接通过访问以太网进行车辆的编程/设码。总网络由保障各个控制单元之间通信的不同的总线系统构成。
2、总线系统概述
两组总线系统原则上有所不同:
a、主总线系统:以太网、FlexRay、 K-CAN、 K-CAN2、 MOST、 PT-CAN和PT -CAN2
b、子总线系统:BSD、 D-CAN(诊断CAN)、LIN、本地CAN
3、车身CAN(K-CAN)
K-CAN用于部件的低数据传输率通信,K-CAN通过中央网关模块也可与其他总线系统连接。一些K-CAN中的控制单元使用一根LIN总线作为子总线,K-CAN的数据传输率为100kBit/s,并采用双绞线结构(两根绞合的导线),K-CAN可在故障情况下作为单线总线运行,车身CAN2 (K-CAN2) K-CAN2用于控制单元的高数据传输率通信,K-CAN2通过中央网关模块也可与其他总线系统连接。一根LIN总线作为子总线连接在K-CAN2内的所有控制单元上,K-CAN2的数据传输率为500kBit/s,并采用双绞线结构。
4、传动系CAN (PT-CAN)
PT-CAN将发动机控制与变速器控制以及安全和驾驶者辅助系统范围内的系统相连接,通过连接至各个系统的分支线构成线型结构,PT-CAN的数据传输率为500kBit/s,并采用双绞线结构,动力传动系CAN2 (PT-CAN2) PT-CAN2是发动机控制范围内的PT-CAN的一个冗余,也用于将信号传送至燃油泵控制,PT-CAN2的数据传输率为500kBit/s,结构是双导线配以辅助唤醒导线。‘
5、以太网
以太网是一种供应商中立的、通过电缆连接的网络技术,使用TCP/IP ( TransmissionControl Protocol/Internet Protocol,传输控制协议/互联网络协议)协议和UDP (User Datagramm Protocol,用户数据报协议)协议作为传输协议。
6、FlexRay
每个通道最大数据传输率高达10MBit/s、 FlexRay明显快于今天在车辆中在车身和驱动机构/底盘范围内使用的数据总线,中央网关模块建立不同的总线系统和FlexRay之间的连接,根据车辆的装备状态在ZGM中有一个或两个各带有四个总线驱动器的星形藕合器,总线驱动器将控制单元的数据通过通信控制器传输至中央网关模块(ZGM),受到限定的数据传输确保每条信息实时传输给定时控制的部件,实时表示在规定的时间内进行传送。
7、MOST总线系统
MOST是一种用于多媒体应用的数据总线技术,MOST总线使用光脉冲用于数据传输,其结构为环形结构,环形结构中的数据传输只沿一个方向进行,只有中央网关模块才能实现MOST总线和其他总线系统之间的数据交换,车辆信息电脑用作主控制单元,其余总线系统的网关是中央网关模块、
8、总线系统中的故障可能
下列故障原因可能会导致总线故障:
a、总线导线短路;
b、总线导线断路;
c、网关中出现故障;
d、控制单元发送和接收部件中出现故障;
二、总线结构的常见问题概述(自E38起的所有车型和MINI):
1、为什么有如此多的总线?
对这个问题原则上有3个答案:
a、总线其实本不多,因为:所有的CAN总线都源自最初的CAN总线PT-CAN和KCAN。
PT-CAN的数据传输率较高;
K-CAN的数据传输率较低;
系统中的许多CAN总线(子总线)是根据这些系统命名的,因此产生了许多总线名称,车身总线也与此类似:外围设备总线和仪表总线在技术上与车身总线相同;
b、这些总线是为不同的数据传输率而开发的。
_数据传输率很高的总线:Byteflight ( BMW安全总线系统)、MOST总线和F1exRay;
_中等数据传输率的总线:两个CAN总线PT-CAN和K-CAN和类似的总线;
_低数据传输率的总线:例如LIN总线;
c、从历史来看,总线要么是跨制造商开发的,要么是由BMW自行开发的:
_跨制造商的总线标准有:CAN、 LIN总线、MOST和F1exRay;
_BMW自己的标准有:Byteflight (BMW安全总线系统)、车身总线和K - CAN;
2、CAN是什么?
CAN(控制器区域网络)是一个总线标准,CAN是在80年代由Robert Bosch GmbH(与高校合作)开发的,目标是驱动机构和底盘范围内的控制单元的联网。为了控制单元能够相互通信,必须规定一个总线标准,此总线标准规定,在控制单元之间以何种方式发送哪些信息,一个CAN信息的组成部分有:SOF、CRC、ID、DEL、ACK、KBT、EOF、IFS。
a、SOF表示“帧起始”(也就是信息的开始)
BMW总线系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)