BMW 总线系统详解
;
b、CRC表示“循环冗余检查”(即校验和比较);
c、ID表示“识别标志”;
d、DEL表示“定界符”;
e、ACK表示“确认”(信息无故障);
f、KBT表示“校验位”;
g、EOF表示“帧结束”;
h、IFS表示“帧间空间”;
CAN目前是BMW最常用的总线标准,CAN是一种双线总线,在每部车辆中都有多个具有不同数据传输率的CAN总线,具有不同数据传输率的CAN总线通过网关(即数据接口)相互连接。
3、“高速”和“低速”或“高”和“低”在CAN总线上有何含义?
“高速”和“低速”表示CAN总线的数据传输率。BMW有2种不同的CAN总线数据传输率:
a、100kBit/s:K-CAN
b、500kBit/s s PT-CAN、F-CAN
“高”和“低”是一个双线总线的两条导线的表述。例如:
a、“K-CAN高”或“PT-CAN高”:较高电压值信号的导线
b、“K-CAN低”或“PT-CAN低”:较低电压值信号的导线
数据传输在2条导线上更可靠、更抗干扰,且支持电磁相容性。
CAN高速:PT-CAN或F-CAN图所示显示PT-CAN或F-CAN中数据传输的两种电平。
CAN 高速数据传输电平坐标:
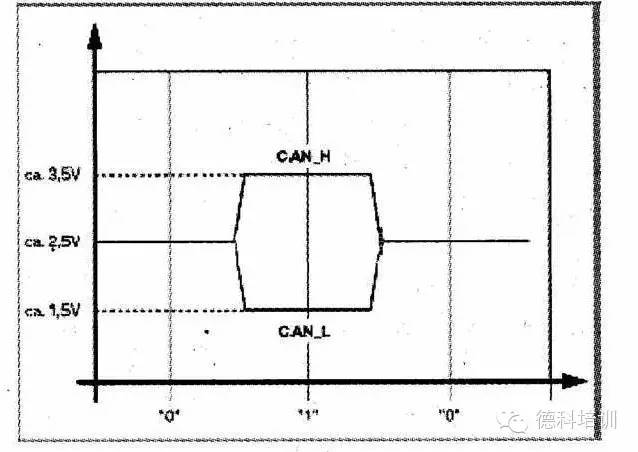
a、CAN- H,即CAN高是较高电压值信号的数据导线;
b、CAN- L,即CAN低是较低电压值信号的数据导线;
PT-CAN是“原始”CAN(同Robert Bosch GMBH开发的一样);
F-CAN是底盘范围内速度更快的CAN总线(也用作PT-CAN的子总线)。
CAN低速:K-CAN
如图显示K-CAN中数据传输的两种电平,K-CAN是一种降低速度的PT-CAN:数据传输率比PT-CAN上低。提示:K-CAN在出现故障时可作为单线总线继续工作,如果在K-CAN中一条导线失效,则数据仍能通过第2条数据导线传递。因此K-CAN有很高的故障安全性。
CAN 低速数据传输电平坐标:

4、如何理解数据总线的“环形”、“星形”和“总线”?
在一条数据总线上的各个控制单元可以有不同的排列:
a、当控制单元在总线上一个挨一个排列时,就是:“线形”
b、当控制单元从一个中央控制单元开始呈放射状排列时,就是:“星形”
c、如果控制单元排列成圆形,就是:“环形”
控制单元线形排列CAN总线具有此种结构。
线形排列:
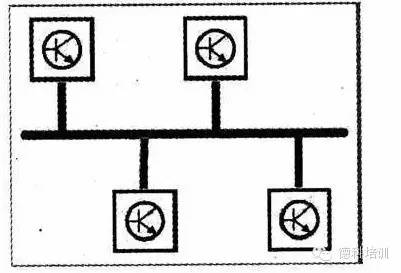
优点:接线简单,并可通过其他控制单元扩充总线结构
缺点:如果过多的控制单元在该总线上发送信息,则产生问题,此总线结构只允许最高约30%的负荷利用率,因此常常附加“子总线”。
控制单元呈环形排列BMW的MOST总线具有此种结构,M-ASK或CCC是其他总线的网关。
环形排列:
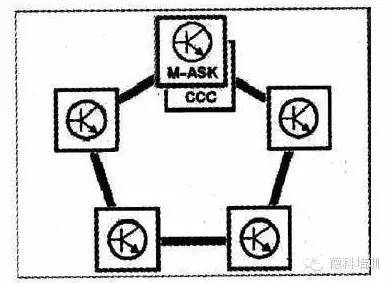
优点:前面和后面的控制单元已明确规定
缺点:必须有抵御某个控制单元失灵的保险装置
控制单元呈星形排列的在BMWE65, E66上,ISIS具有此种结构(ISIS:智能安全集成系统),SGM(安全和网关模块)是星形结构中的中央控制单元,在最早的E65和E66上,SIM(安全信息模块)是星形结构的中央控制单元。
优点:数据传输率高,安全性高:如果某个控制单元失灵,不会影响其他控制单元
缺点:接线复杂
5、何谓:“子总线”、“主控单元”和“副控制单元”?
“子总线”是从属的总线。子总线通常存在于CAN总线上,以便无须通过CAN总线传输过多的数据。如果多个控制单元或部件属于一个系统,则为该系统加一个专用总线分支。接在其他数据总线的数据接口上的控制单元常被称为“主控单元”,子总线上的控制单元是“副控制单元”,主控单元和副控制单元之间发送的数据量只加在子总线上,上级总线保持空闲。
子总线有多个名称:“本地CAN”,“专用CAN”。这些名称已经表明这是一个子总线。MOST总线上也有“主控元”和“副控制单元”:一个上级控制单元就是主控单元。主控单元控制所有功能,“副控制单元”只执行功能,在诊断时BMW诊断系统也起“主控单元”的作用。诊断期间车辆中的所有控制单元都是“副控制单元”。这些控制单元向BMW诊断系统发送数据。在诊断期间BMW诊断系统是”主控单元”。
6、“车身总线”和“外围设备总线”是哪种总线标准?
车身总线和外围设备总线是BMW自己开发的专用总线标准,外围设备总线是基本模块和活动天窗范围内的车身总线。因为车身总线已经满负荷(E38),所以开发了外围设备总线。
7、为什么存在“日规
BMW总线系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)