奥迪Car-to-X新玩法,前装车联网走到哪一步了?
在这两三年间,对于车联网的各种解读中,经常能看到类似的话:当车联上网,就不再是信息的孤岛,就有了各种可能。因而,杀手级的应用,就变成了大家的竞逐之点。
从车联网的实现角度来说,要让车辆不再是「孤岛」,具备联网功能仅仅只是个开始,要达成「无限可能」,那么首先要解决两个问题:和谁联,联上之后做什么。而关于这两个问题,每家汽车制造商、服务供应商都有自己的想法。

在上周与奥迪的德国慕尼黑之行中,车云菌除了与VR眼镜各种近距离接触得知自己有点儿晕3D之外,还了解了一下奥迪目前Car-to-X通信项目的一些进展。奥迪将会从今年开始在奥迪Connect服务中加入Car-to-X 服务,首先在A4/A5和Q7等车型上搭载。从今年年中,奥迪将开始收集各项信息,并建立数据库,等到数据库达到一定规模,奥迪将会在年底首次发放数据供用户使用。这项服务会首先在德国推出,中国推出这一服务的时间尚未提到。
3项数据共享功能
在这次展示的Car-to-X技术中,云端是连接的第一站,也是数据的集散地,不同的数据会有不同的流向。数据在车辆端收集到之后,通过车内网络上传到云端,再通过云端传送到其他奥迪车辆之上。目前奥迪正在搜集的数据和开发的功能有三种:
1.通过交通标志信息预设驾驶模式
通过车载摄像头识别交通标志信息,并上传到云端。上传到云端的数据需要经过验证才会被发布,验证的标准是上传这个信息的汽车数量。只有当足够多数量的车上传这一信息之后,才会通过验证进而分享到其他车辆和导航系统之中。
这种信息更新方式,对于自动驾驶和现阶段的预测性ACC系统会更有意义。届时,车辆会根据系统中的各项交通信息来预设驾驶模式,比如针对限速信息,提前改变车速。
2.采集和共享车辆危险信息
目前危险信息包括两类信息:一是奥迪品牌的汽车发生了事故或者故障;二是周围环境可能会影响到安全驾驶,比如湿滑路面或者因为大雾和大雨带来的能见度降低。
演示系统实时采集到的车辆故障信息前者当车主激活了车辆上的eCall紧急呼叫系统,或者当安全气囊被激活之后,车辆会自动发出事故报告;而针对后者,则需要对具体影响信息进行评估和验证,比如会通过车辆上的雨水和光传感器接受到的数据,以及雨刷器的运行模式来对车外能见度进行评估,经过验证的危险信息才会通过云端共享到其他车辆。
3.路边停车位信息共享
在汽车行驶时,车辆会通过超声波传感器或者摄像头来识别路边的免费停车位和停车位的占用信息,并上传到云端。
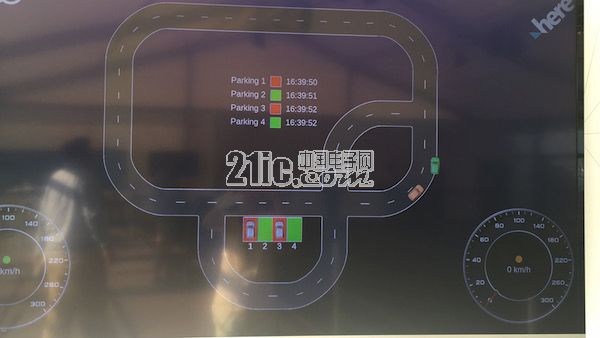
演示系统实时采集到的停车位信息路边停车位信息的共享包括两个方面,一方面,系统会对车辆的驱动系统位置、转向角度和速度等参数进行分析,从而判断出车辆是否在进入和离开停车位,如果发现是,则会自动向云端服务器发送报告。这类即时信息可以实时分享到其他奥迪的车辆中。
另一方面,根据历史收集到的数据与实时数据,建立统计模型,然后可根据当前时间计算出现在可能存在的免费空停车位数据,以此作为驾驶员寻找停车位的指导信息。
在这之中,不仅需要车辆上的传感器能够及时的接受与分析数据,也需要数据基础足够大。如何跨越品牌的界限是目前各家车企都在考虑的问题,此前奔驰提到过Car-to-X将向其他品牌开放,但是并没有提出具体措施与实施时间。
2种功能验证方式:模型车与PCC
在云平台,每秒种都可以获得大量的数据,这些数据应该和谁联结?奥迪给出了两种不同的验证方式。一种是通过模型车来对正在研发中的技术和项目进行验证,另外一种则是通过奥迪一项名为PCC(Personal Company Car)的项目,以实际车辆来载体,对已经量产的技术进行验证。

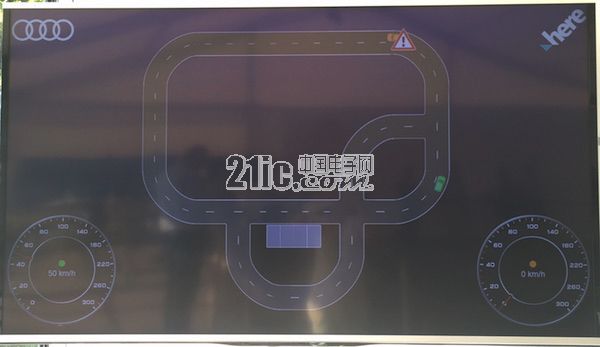
奥迪Q5 1:8模型车这就是奥迪现在用于测试的模型车。模型车以Q5为模型,比例是1:8,由电动马达驱动,最高速度能够达到40公里/时。这辆车上安装有两个摄像头——一个单目一个立体,与十个超声波传感器——五个在前方,三个在后方,两边各一个,可以检测车道线、交通标志、障碍物与停车位等。另外还有加速度传感器能够记录模型车的变化方向。在车内,有一个四核处理器的高速电脑,这个微型电脑的构造与在奥迪自动驾驶车上用的zFAS是相同的。车上的数据能够通过Wi-Fi实时传递到后台的云端。

模型车正在进行功能演示在现场,这辆模型车分别演示了三项功能。从演示效果来说,信息的上传和分发实时性很高,对于临时「突发」状况——为了检测车辆避障功能而进入场地的避障工作人员,也能够提前识别并绕行。不过,这种模型车的方式更适用于验证技术的机制和原
V2X信息安全奥迪车联网 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)