有机械耦合的电容式硅微陀螺敏感信号读取
L2、R2、C2分别代表敏感轴方向的质量、阻尼和刚度。V2等效为驱动力。
C1、C2两端电压等效为驱动方向和敏感方向位移。V1代表转动角速度。A1对驱动方向位移的微分得到速度,A11乘法运算后得到科氏力。A13将刚度耦合与科氏力合成为敏感轴方向的驱动力。通过这个模型可以仿真不同条件下的敏感输出与驱动力V2的相位关系。也可以研究刚度耦合与敏感输出的相位关系。图4的近似仿真,主要是用于电路设计讨论。
三、采样方法设计
根据以上分析,应该在机械耦合最小时采集敏感信号。由于正反向振动机械耦合可能不一致,机械耦合最小时刻应分别选取。利用振动时机械运动的惯性,在采样时关断驱动电压信号,消除电耦合干扰。
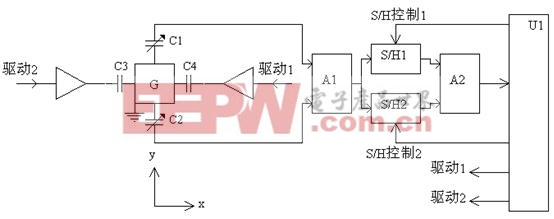
图 5 采集与驱动框图
G 微陀螺机械振动块;C1、C2 敏感电容; C3、C4 驱动电容;A1 差动电容调理电路;A2 差动放大器; S/H1、S/H2 采样保持器;U1 采集控制单片机
Fig. 5 sample and driver block
G vibration block of micromachined gyroscope;C1,C2 sensing capacitor; C3,C4 driving capacitor;A1 conditioner of differential capacitor; A2 differential amp.;S/H1,S/H2 simple-holder; U1 SCM
图5为采集与驱动框图。控制时序由U1完成。为了精确控制时序,采用时钟频率较高的DSP器件,本实验采用的是TMS320F2810。控制时序如图6所示,采样时序脉冲发生在振动质量块过静态平衡点。实验过程:通过显微镜观察初步确定谐振频率范围;在零转速条件下,通过改变驱动频率寻找机械耦合最大的频率,并在有转速条件下,搜索信号输出最大的驱动频率,双方面验证找到机械谐振频率;在零转速条件下搜索到机械耦合最小的同步采样时刻。在这个时刻一般有转速时的敏感信号也接近最大值。初步试验结果:驱动周期3017Hz,转台转速0.1Hz,10次平均,数字输出信号跳动1%。
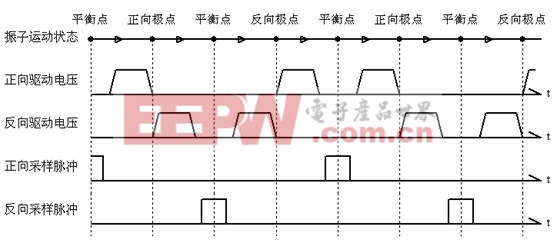
图 6 控制时序
Fig. 6 control order
各脉冲可通过片上外设PWM接口送出,基本上不耗费软件时间。对于确定的硅微陀螺,一旦最初的搜索、标定完成后,脉冲时序便成为固定常数。正常运行时,软件仅完成简单的补偿修正工作。进一步还可以考虑用SOC器件,把S/H1、S/H2、A2、A/D、PWM、CPU等功能由一只芯片完成。
四、结束语
任何硅微陀螺都不可避免地存在机械耦合干扰,本文分析指出存在干扰影响最小的可供对敏感信号采样时刻。这个采样时刻靠近敏感信号的峰值点。结合以前文章[]所提出的采样时关断驱动信号方法,可提高硅微陀螺的性能。笔者认为,由于各微陀螺仪谐振频率的差异,直接检测质量块过平衡点时刻的方法还需研究。这将是以后进一步的研究。
- 电容式触控电荷转移横向模式技术(01-16)
- PICl6LF874单片机在电容测量模块中的应用 (08-25)
- 如何测量电容式触摸屏的实际信噪比(01-25)
- PIC16LF874单片机在电容测量模块中的应用(09-18)
- 精密电容测量仪(01-28)
- 虚拟电容式传感器检测系统的设计与应用(01-12)