高效测试汽车总线系统
在汽车设计阶段,工程师需要一套完整的测试工具,能对复杂的汽车总线系统进行深入分析,以清楚了解总线上正在发生的事情。工程师不仅需要看到总线上的数据内容,还需要隔离感兴趣的事件,同时还要确定问题的类型和解决办法,这些需求都对仪器仪表厂商带来巨大的挑战。
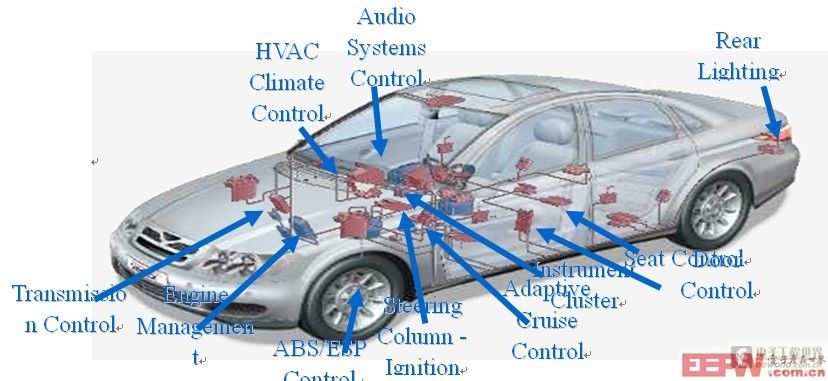
图1 典型的汽车网络部件
力科为汽车总线系统测试提供的方案包括通用数字示波器WaveRunner Xi,高压差分探头ADP305,以及专门的应用软件包。对CAN总线测试而言,CANBus TDM软件包提供总线触发、解码和测量功能; LINBus TD软件包则提供LIN总线的触发和解码功能,同时针对新型的FlexRay总线测试需求,力科还提供FlexRay TDP软件包,不仅能进行FlexRay总线的触发和解码操作,而且可以分析物理层信号完整性包括眼图和抖动质量。下文重点介绍这些软件包的主要功能。
2、 CANBus TDM的主要功能
2.1、总线触发功能
在汽车总线调试过程中,通常必须确认某个特点消息已经通过总线生成或发送。消息帧中包含嵌入式数据值和其他消息。常用的示波器功能如状态触发或码型触发不适用这一目的,它们是为多条通道上的并行数据设计的。这就需要一种可以对串行比流内容作出响应的触发功能。
CANBus TDM软件包的Trigger功能支持按照消息帧的不同内容触发信号,可以根据 数据帧类型(Remote、Data或Error)、ID、 ID 位长度(29位或11位)、数据净荷、DLC等协议字段进行触发。比如,工程师只对ID=0x7a6的CAN消息感兴趣,可以按照图2所示界面设置触发条件。
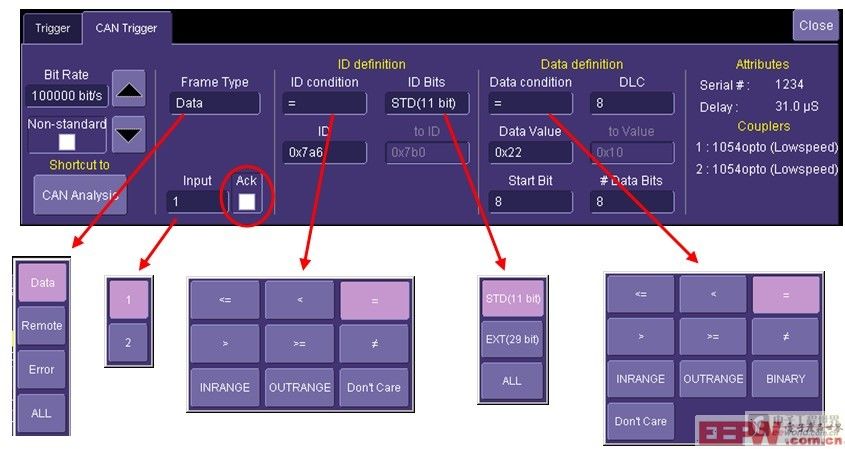
图2 CANbus TDM触发设置界面
2.2、总线解码功能
CANbus TDM中的Decode功能采用先进的软件算法,将探头捕获到的CAN波形分解成协议解码信息,然后把解码后的数据叠加在波形上。根据时基设置或缩放程度,可以精简或扩展解码信息,更好地协助了解短采集或长采集中的事件。协议的各个字段如 ID、数据净荷、CRC等都采用不同颜色区域标记,理解起来非常容易。通信周期开始帧和错帧高亮度显示。解码操作非常快,即使在长采集中也不例外。用户可以选择解码成十六进制或二进制格式。力科专门的汽车总线分析仪VBA型号还支持工业标准的DBC格式文件直接将数据翻译成文本符号,更加方便工程师调试汽车网络。下图3显示了力科示波器解码CAN消息帧后的效果。

图3 CANbus TDM 总线解码界面
2.3、识别错误帧类型并标记
CAN总线出错的类型有很多可能,包括ACK错误、CRC错误、填充位错误、数据格式错误等。一些示波器厂家的CANbus软件包仅能标记出数据帧为”Error”,但不能区分究竟是具体的错误类型,这对工程师调试总线问题是很不方便的。而力科的 CANBus TDM提供了此功能,不仅能够识别总线错误类型,而且能用高亮颜色区域标注在波形上方,为工程师迅速定位总线错误来源提供了有效手段。下图4为力科示波器屏幕上标注的”CRC Error”总线出错状态。

图4 总线CRC错误识别并高亮标注
2.4、总线参数测量功能
CANbus TDM提供了一种革命性的分析能力,不仅能按数据帧内容触发和解码,而且提供了测量/图示工具,可以大大提高用户调试和验证CAN ECU或网络性能的能力。作为TDM工具集的一部分,CAN Measure/Graph(CAN测量/图示功能)在力科示波器已经提供的150多个参数中增加了5个CAN特定测量参数。此外,与直方图参数一样,也可为这些参数绘制直方图、趋势图和追踪图。下面概括了CAN参数集:
# CANLoad – 计算每次采集的CANbus负荷,用百分比表示,并能够过滤计算负荷使用的消息。
# CANtoAnalog – 测量模拟信号边沿跳变与指定CAN消息之间的时间延迟。
# CANtoCAN – 两个指定CAN消息之间的时间延迟。
# CANtoValue – 计算嵌入CAN消息数据字节中的值。
# t@CAN – 计算从触发到指定CAN消息的时间。
下图5示例了如何测量从“唤醒“信号跳变沿到之后第一个CAN消息帧起始位的时间间隔,通过使用CANtoAnalog参数实现。

图5 CANtoA
- 现代实时频谱测试技术(10-23)
- TD-SCDMA系统终端CC实体的一致性测试(10-27)
- 用数字荧光示波器对开关电源功率损耗进行精确分析(11-04)
- 基于FFT的低频谐波失真度测试仪(01-30)
- 针对高速物理层的测试解决方案(03-29)
- 秘密武器助你从容应对噪声检测难题(03-29)