基于MEMS组合模块的姿态检测系统设计
摘要:在研究两轮自平衡电动车的平衡控制的基础上,设计了基于MEMS组合模块的姿态测量系统。通过对各MEMS传感器输出信号特征的提取、分析,将离散化低通滤波器模型与互补滤波的思想相结合,巧妙地构造出一种便于本系统实现的数据融合模型。同时,提供了一种基于MEMS组合模块姿态检测的低成本、可行性方案。
关键词:MEMS组合模块;姿态检测;数据融合;MMA7260;ADXRS610
引言
在两轮自平衡电动车的平衡控制中,对车体的俯仰角进行实时准确的测量是整个平衡控制的前提。传统的机械式姿态测量仪体积大、响应速度慢、测量精度低,远远不能满足双轮自平衡电动车平衡控制的实时性和精确性要求。基于光学原理和图像处理技术的姿态测量仪精度较高,但是价格昂贵,且需要进行大量的复杂运算,一般需要计算机辅助完成,不符合两轮自平衡电动车的成本和车载性要求。本文采用ME-MS组合模块的设计方案实现了对车体俯仰角的测量。本测量系统不但具有体积小、响应快、成本低的特点外,而且经过数据融合处理后,有效地减小了环境中震动干扰的影响,能够在具有强烈震动的车体环境中达到系统的精度要求。
1 系统构成及工作原理
1.1 系统构成
本姿态测量系统主要由单片机PIC16F877、加速度计MMA7260和陀螺仪ADXRS610构成。系统结构框图如图1所示。Microchip公司提供的PIC16F877芯片作为控制芯片,负责对加速度计与陀螺仪进行A/D采样及后续的数据处理。

ADXRS610是ADI公司推出的一款高性价比的单轴陀螺仪。ADXRS610是一款模拟量输出器件,其输出量与绕旋转轴的旋转角速度成线性正比,对角速度量进行积分运算即可得到旋转的角度值。ADXRS610角速度的测量范围是±300 rad/s,灵敏度为6 mV/(rad·s-1),零位输出电压为2.50 V,非线性误差为±0.1%F.S.,-3 dB带宽为40 Hz,固有频率为14 kHz。
1.2 加速度计的数学应用原理
MMA7260是一款性价比较高的三轴模拟量输出加速度计,模拟输出量与其敏感轴方向上所受加速度大小成线性关系。文中利用MMA7260测得静态加速度值,进而计算出被测平台与水平面的夹角值。所谓测量静态加速度,是指在平台静止时,测量重力加速度在某一敏感轴上的分量的大小。由于重力加速度的方向总是垂直向下的,这正好为测量系统提供了一个天然的参考坐标系。通过加速度计间接测量角度的数学原理有两种方式。
方式一如图2所示。利用单一敏感轴测得重力加速度分量,其中角度θ、重力加速度g与敏感轴分量gx三者构成反余弦关系:
方式二如图3所示。
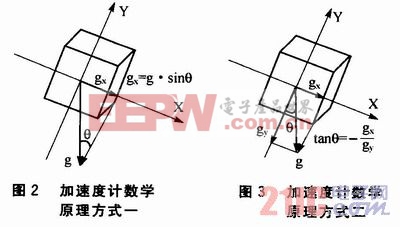
利用双敏感轴测得重力加速度分量,其中角度θ、Y敏感轴分量gy与X敏感轴分量gx三者构成反正切关系:
方式一只需要单轴加速度计就能实现角度测量,在数据采集时也只需要单通道的ADC模块进行处理,在硬件成本和软件编程的难易度方面都有优势。方式二采用两敏感轴同时采集两个方向的重力加速度分量,通过两个轴的分量比来获取角度值。由于两敏感轴所处的环境因素一样,因此对于震动、温度变化等因素的干扰有一定的抑制效果。另外,对于不同地理位置的重力加速度常量值的变化,方式一会产生相应的误差,而方式二可以从原理上消除此类误差。经比较,选用第二种方式。
1.3 数据融合模型
互补滤波的基本原理如图4所示。互补滤波的思想即针对不同输出特性的传感器,采用不同的滤波方法将所得的信号结合起来,从而克服单一传感器失真严重的缺点,获取到更为准确的信息。使含有高频噪声分量的加速度计信号通过低通滤波器滤波,使具有积分漂移效应的陀螺仪信号通过高通滤波器滤波。
,yi表示i时刻的输出;xi表示i时刻的输入;yi-1表示(i-1)时刻的输出;△T为采样周期。基于互补滤波的思想并结合离散化数字低通滤波器模型,构造出如下模型:
其中,angle为系统最终的输出角度值;gyr为由陀螺仪数据计算得出的角速度值,gyrdt则为一个采样周期内的角度增量;acc为由加速度计数据计算得出的角度值。当选择合适的时间常数RC和采样周期△T时,此模型能模拟实现对陀螺仪的高通滤波和对加速度计的低通滤波
的互补组合功能。同时,时间常数和采样周期也确定了系统对陀螺仪和加速度计输出信号的置信度。当本系统选择时间常数为0.1 ms,采样周期为5 ms时,代入上式模型有:
假设初始状态时,系统角度估计值angle、陀螺仪输出角速度值gyr和加速度计输出的角度值acc均为零。表1是当加速度计收到一个10°数值的突变信号时,在连续10个采样周期内估计值angle的变化过程。

从表中可以看出,在系统采样周期设为5 ms时,如果
- 旋转状态下动态倾角测量系统设计(10-28)
- 意法半导体在数字输出三轴加速传感器中嵌入智能功能(10-23)
- 工业应用中的测量(02-23)
- 基于ADISl6355 MEMS的惯性测量组件系统设计(03-07)
- 基于傅里叶变换的MEMS地震检波器设计(11-22)
- 基于nRF905的无线加速度测量系统设计(09-12)