基于MEMS组合模块的姿态检测系统设计
此突变信号频率高于200 Hz,即该信号持续时间不超过一个采样周期,那么此信号给系统带来的最大偏差不会超过0.9°。此时,可认为系统对于加速度计的高频信号不信任,而信任陀螺仪的信号。如果此突变信号频率低于20 Hz,则该信号的持续时间会达到10个采样周期以上,在第10个采样周期时,系统的估计值angle为9.0°。此时,可认为系统信任加速计的低频信号。由此可见,此模型具有对加速度计的低通滤波功能和对陀螺仪的高通滤波功能。
2 仿真验证
应用文中构造的数据融合模型,通过Matlab工具对实测原始数据进行仿真,验证此模型的有效性。加速度计原始信号如图5所示。
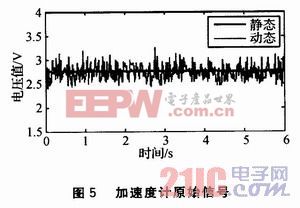
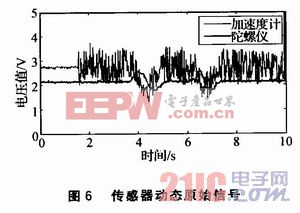
这是加速度计在动态和静态时的原始信号输出对比,可见加速度计的动态输出由于存在高频干扰,致使输出数据完全不能准确地反映真实的姿态值。被测平台发生倾斜时采集的加速度计和陀螺仪的原始信号值如图6所示。可以看出,在1.6 s之前被测平台没有受到震动干扰,此时加速度计的输出信号振幅较小。在1.6 s之后,被测平台受到震动干扰,加速度计的输出信号受到严重干扰,而陀螺仪的输出信号几乎不受震动干扰。
数据融合结果如图7所示。其中,加速度计曲线是通过对加速度计原始信号计算得到的角度值,可见依然波动较大。陀螺仪曲线是通过对陀螺仪的输出角速度值进行积分运算所得的角度值。数据融合曲线是通过文中构造的数据融合模型进行解算得到的角度值。
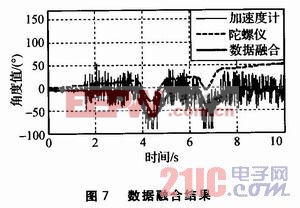
由图7可以看出,由单一的加速度计得出的角度值波动很大,不能准确反映真实值。由单一的陀螺仪经过积分运算得到的角度值虽然没有波动,但随着时间的增大,产生的积分累积效应将非常严重。从0 s到10 s,陀螺仪产生的积分累积偏差接近了50°,并以平均5°/s的速度加速扩大。这也是不能单独使用陀螺仪进行平台姿态检测的原因。而经过数据融合处理后得到的角度值,既克服了加速度计动态性能差的缺点,又很好地补偿了陀螺仪的积分飘移。
3 系统实现
3.1 硬件设计
在电路板设计之初,需要根据加速度计、陀螺仪的敏感轴方向确定传感器的安装位置和角度。陀螺仪和加速度计应安装在较近的位置,尽量减少两传感器的外部环境差异,这有利于减少后期数据处理的误差。在平台刚性接触面是否采取防震处理,如加入防震垫片等措施,这对于传感器的输出有很大影响,尤其是对加速度计的影响尤为突出。
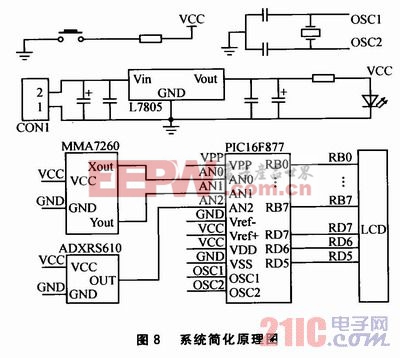
为了方便调整传感器安装位置和角度,在硬件设计时采用了模块化思想,将加速度计和陀螺仪设计在一块独立的小电路板上,并使加速度计的X敏感轴正方向指向被测平台的水平向前方向,而陀螺仪的旋转敏感轴则需要垂直于加速度计的X轴且平行于加速度计的Y轴进行安装。系统通过预留数据端口外接LCD液晶显示屏,可以经过简单编程直接将姿态数据显示出来。系统的电源由一只7.5 V可充电电池提供,并由L7805构成的稳压电路转换成稳定的5 V电源为整个系统供电。采用4 MHz晶振提供系统时钟。系统简化原理图如图8所示。
3.2 软件设计
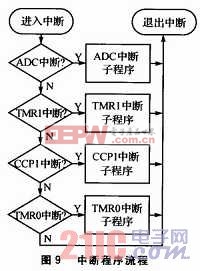
PIC16F877中自带一个10位精度的模/数转换(ADC)模块,支持8路模拟转换通道。对于本系统中的加速度计和陀螺仪,其10位模/数转换模块的分辨率完全可以达到系统所需的精度要求。根据系统时钟频率和模/数转换(ADC)模块转换时间,选择1/8时钟频率作为模/数转换时钟,分别由AN0、AN1、AN2通道采集加速度计和陀螺仪的模拟量信号。由于陀螺仪的采样结果在后续的信号处理中需要进行积分处理,所以要求模/数转换模块的每次采样间隔时间尽可能相等,以保证后续运算的准确性。在PIC16F877中的CCP2模块设置为特殊事件触发模式时,配合计时器1,可以实现对模/数转换模块的定时中断开启功能。在使用特殊事件触发启动模/数转换时,需要注意几个细节方面的处理方能得到准确的模/数转换结果:首先,在模/数转换模块初始化时,需要将ADCONO寄存器中的ADON位置1,否则即使在特殊事件触发后也不能启动模/数转换;其次,在通过AN0、AN1、AN2三个模拟通道相互切换实现对加速度计和陀螺仪的采样过程中,需要使用ADIF中断响应来获取模/数转换的结果并进行通道切换,在通道切换后,必须保证在下一次模/数转换模块触发来临之前有足够的采样时间。根据对整个系统需求的综合分析,将CCP2的触发采样周期设为5 ms。中断程序流程如图9所示。
实验是在25℃室内环境下进行测试的。首先将本姿态测量系统固定安装在两轮自平衡电动车车体上,再将两轮自平衡车的电机上电运行以提供一种强震动干扰环境。表2是将两轮自平衡车车体分别固定在0°、30°、45°三个位置进行测量的数据。
- 旋转状态下动态倾角测量系统设计(10-28)
- 意法半导体在数字输出三轴加速传感器中嵌入智能功能(10-23)
- 工业应用中的测量(02-23)
- 基于ADISl6355 MEMS的惯性测量组件系统设计(03-07)
- 基于傅里叶变换的MEMS地震检波器设计(11-22)
- 基于nRF905的无线加速度测量系统设计(09-12)