旋转状态下动态倾角测量系统设计
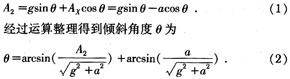
0引 言
基于MEMS加速度计的倾角测量模块具有体积小、质量轻、成本低、抗冲击、可靠性高等优点。对有加速度干扰下的倾角测量存在较大误差,本文围绕这一误差产生的来源和去除这种误差的方法进行了研究。
旋转状态下的倾角测量属于有加速度干扰的动态倾斜角度测量的一种。在旋转参考系下,质量为m的物体受到指向旋转中心的连接物的牵引力,但却相对于该参考系静止,没有加速度,不符合牛顿第一定律。所以,相对于惯性系作匀速转动的参考系也是非惯性系,要在这种参考系中保持牛顿第二定律形式不变,在质点静止于此参考系的情况下,应引入离心惯性力,该力与旋转轴垂直。该状态下影响被测对象倾斜角度正确输出的加速度正是该力造成的。为了抵消这种在旋转状态下由于加速度引起的误差,本文介绍了5种不同的实现方案,并比较了各自的优缺点。
1动态倾角测量系统的构建
1.1 单轴/双轴加速度计和直流电机方案
如图1所示,V1为双轴加速度计,V2为单轴加速度计。V1为直流电机的负载,通过控制算法使AY的输出值始终向-1.0gn无限靠近(与重力加速度同向),此时,与AY垂直的AX轴的输出刚好为向心加速度-a。V2的输出值为

此方法最大的优点就在于理论上简单,易于理解,对数据处理算法要求不高。但这种方法由于使用电机驱动,会增大功耗;由于需要编写控制算法或使用专门的控制单元,会增大系统设计和调试的复杂性以及硬件开发成本,不易满足实时性要求,总体可行性不强。
1.2 2只单轴加速度计方案
如图2所示,其中,V1与旋转中心的距离为R,V2与旋转中心的距离为R+r,V1与V2的敏感轴在同一直线上。静态测量时 AX=gsinθ
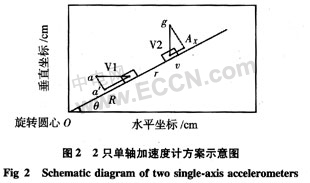
当被测对象绕Y轴旋转时,产生与被测对象夹角为θ的水平面上的向心加速度,方向指向Y轴,大小为a=ω2T,此时,V1,V2两加速度计处的向心加速度的大小为

由于过高g值(几十gn)的加速度计不适合检测倾斜角度,但过低的g值(小于0.5gn)又会导致当旋转角速度增加时会迅速使加速度计输出量达到非线性范围,甚至超出量程。故选取低g值加速度倾角传感器,如VTI公司生产的单轴加速度倾角传感器。
上述方案中,当θ=0°且以最高角速度旋转时,远离旋转轴的V2会首先超出量程范围,所以,为保证两传感器在量程范围内工作,V1,V2相对于旋转轴的绝对位置要尽量小,并在允许的范围内,要尽量增大V1,V2之间的相对位置r,以使测量系统能够充分敏感出两位置由于所做圆周运动的半径不同而引起两传感器输出值的差别。
由于运用2只加速度计且需要相隔一定的距离,所以,该方案的缺点是不利于硬件制作的小型化。
1.3双轴加速度计方案
如图3所示,静态测量时
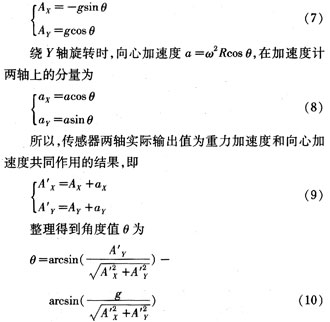
此方案运用1只双轴加速度计,相对于2只单轴加速度计方案,克服了不利于硬件制作小型化的缺点;但此方案的缺点在于可能使加速度计两轴工作在输出特性不同的区向(例如X轴工作在线性度和分辨力较高的区间,而Y轴工作在线性度和分辨力相对较差的区间),会使该系统在整个量程范围(-15°<θ<+15°,ω≤100°/s)内的精度降低,稳定性总体不高。
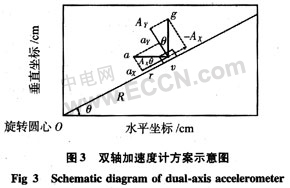
1.4可减小零位误差的双轴加速度计方案
安装1只双轴加速度计如图4所示。AX轴与被测对象夹角为β。其中,β的具体数值与当被测对象绝对零度时,两敏感轴的输出有关,即
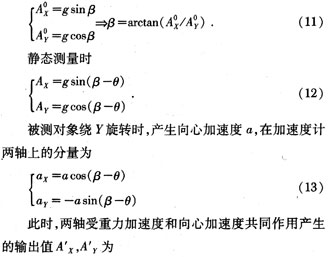

此方案为双轴加速度计方案的一般化情况,在保证了硬件制作小型化的同时,通过调整加速度模块与被测对象的安装角度,可以使加速度计两轴尽量工作在相同的输出特性区间范围内,对于提高测量系统的稳定性,尤其在减小零位误差方面十分有益。
这种方法可以适合一类环境下的应用,但是如果对传感器提出更高的要求(如,倾角测量范围增大,对象旋转速度更快),还是有可能使传感器两轴的工作范围不尽如人意,即便此时通过调整安装角度,能够使两轴的输出特性相似,但不一定可以保证两轴都工作在各自线性度好、分辨力高的区间。
1.5可任意设置夹角的双轴加速度计方案
此方案为双轴加速度计方案的更一般化改进,针对某种特定场合的应用,可以选取2只单轴加速度计,将二者安装在同一位置,二者之间的夹角与二者与被测对象之间的夹角,甚至两加速度计的量程,都可以根据该种场合自由任意设置,只要根据物理几何关系热传导出的计算公式满足单值对应(系统中2只加速度计敏感轴的输出值的每一种组合都对应着唯一的一个角度值)即可。通常选取线性度最好的区域和输出最敏感的区域。
此方案非常灵活,但须准确建立被测对象的物理模型。
2系统结构设
- 用数字荧光示波器对开关电源功率损耗进行精确分析(11-04)
- 矢量网络分析仪的时域功能在天线测量中的应用(03-03)
- 系统DC电源的选择影响着测试吞吐量(04-28)
- 应用灵活的解决方案进行毫米波测量(07-01)
- 调整光学方法用于纳米级测量(01-21)
- 使用CS5463型进行电能测量的原理及应用(01-25)