CCD测量系统中基于自适应相关算法的动态目标跟踪
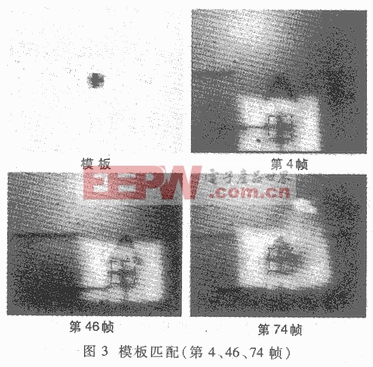
大孝形状等或者连续帧中的原点位置发生变化,都会引起图像相关偏离。一旦模板不能和目标严格地匹配,那么最佳匹配点就不是目标的中心。这会给相关算法造成误差。虽然这个误差是随机的,但是它会随着相关处理逐帧积累。如果积累了足够的帧数,模板会完全偏离目标。增大模板也会引入误差。这是因为,当模板大于目标时,模板中将有部分背景信息。每帧中背景的变化,便引入了误差。为了消除误差,必须尽可能地减少模板中的背景信息。 为了解决以上问题,引入了自适应的相关算法。首先在图像的灰度直方图中寻找一个阈值,使大多数的像素,特别是背景像素都在阈值之下。在图像中定出模板的位置,寻找一个区域使其边界的像素灰度从阈值之上变为阈值之下,作为目标的边界,这样,目标的位置是目标区域中的一个点,目标被一个矩形窗口框住,可以认为矩形的中心是目标的中心。这样,系统补偿了逐帧匹配引起的偏离误差,减小了误差的积累。自适应的窗口减小了引入过多背景元素而在相关过程中造成的影响。 3.3 减少运算量 在CCD误差测量系统中,即使是事后处理,如果对每一帧图像进行全图搜索,其运算量仍然是巨大的。从前面的分析可知,运算量同搜索图和模板的大小均有关系。在本系统中,模板的大小基本是固定的,在这种情况下,减小搜索力瓣大小就成为了如何减少运算量的关键。经过对系统实际的图像分析,发现连续的每一帧中同一目标的位置改变缓慢。对算法进行改进,对于连续视频图像的第一帧做全图搜索,找出匹配点;对于后续各帖,在前一帧图像目标位置的基础上进行模板匹配,将当前帧搜索图定义为前一帧目标位置周围一个边长为N的正方形区域(目标位置不一定正方形的中心),在此较小的搜索图中进行相关匹配。同时设定一个阈值R,如果相关系数量大值R(i,j)MAXR,那么认为在该搜索图中没有找到目标,则进行整帧图像的搜索,否则接受匹配点为目标位置。 CCD误差测量系统跟踪动态目标,在对连续视频图像处理时,搜索图的大小应和运动速度有关。如果图太小,有可能使目标不在搜索图内,而必须进行全图的匹配,如果图较大,又会增加运算的开销。可以增加运动趋势的估计,使搜索图向运动趋势的方向平移。对于当前帧搜索图区域的确定可以根据前两帧位置间的关系来确定,求前两帧位置水平和垂直坐标的差Δx和Δy来决定偏移的方向。在有效的测量阶段,目标的运动基本是匀速的运行,在水平方向和垂直方向的速度变化不大。因此,搜索图的平移量可以根据|Δx|、|Δy|来确定。在当前帧中以前一帧的目标位置为新搜索图的中心,在各方向分别平移|Δx|、|Δy|个像素,得到当前的搜索图。 4 软件实现和处理结果 由于软件和系统硬件的关系紧密,数据处理量大,对系统的可靠性要求高,因此采用Visual C++编程实现。实验中图像为768×576的256级灰度图,模板的大小为40×40,搜索图的大小为80×80。图3是实际测试时得到的图像匹配后的搜索图。图中黑白相间的方框是匹配得到的目标,图中依次为模板、第4、46、74帧匹配的结果。黑白相间的方框十字中心是目标中心。 对匹配的结果同图像中目标的实际位置进行比较得出:在连续的140帧图像中,85%的结果和实际目标位置误差在10个像素以内,只有两次的误差大于20个像素。这是由于图像质量误差,几乎无法检测到目标所致。没有发生模板完全偏离目标的情况。 经过实验证明,系统软件运行可靠、效率高,跟踪算法的准确高,能在复杂背景下实现对目标的准确匹配。但是模板匹配算法运算量惊人,在应用中选择的模板通常为40×40像素,搜索图为80×80像素,连续处理1000帧图像,要进行8.07×10 9次乘除法运算。因此对于模板匹配算法有进一步改进的必要,可以引入SSDA(序贯相似性检测算法)来提高算法的效率;对于背景比较简单,信噪比高的图像可以先二值化,再通过异或运算来进行匹配。这样没有了复杂的乘除运算,代之以异或和加法运算,可以进一步提高效率。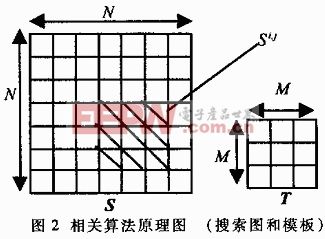
- 基于CCD技术的非接触在线检测仪设计(06-27)
- 一种舰船尾流探测系统设计(08-05)
- 3-D轮廓测量中相位解包裹应用(11-10)
- 射线检测中CMOS的研究(01-04)
- 基于CCD16点数学模型的全自动焦度计光学图像系统的设计(01-09)
- 滚珠螺母形位误差的CCD测量(03-23)