一种舰船尾流探测系统设计
0 引 言
舰船、潜艇以及其他水下航行器在运动中,都会由于螺旋桨的旋转产生空化或者海面的波浪破碎以及从吃水线部分大量空气的卷入,在舰船尾部的海水中形成一条含有大量气泡的气泡幕带,即舰船尾流。尾流中的气泡形成后会受到重力、浮力、粘滞阻力三部分合力的作用而经历一个溶解、上升以及气体膨胀的过程。尾流中气泡的存在使得其透射、散射等光学特性与无扰动的静水不同,利用上述性质的尾流光探测方法应运而生。对尾流的探测是间接探测舰船及水下航行器的一种新方法,有着广阔的应用前景和重要的国防意义。本文设计实现了一种利用激光照射尾流气泡,通过测量气泡后向散射光空间频谱分布来探测尾流气泡的舰船尾流实时探测系统。
1 系统工作原理及硬件组成
1.1 系统工作原理
尾流光探测方法通常采用直接测量尾流气泡后向散射光功率强度。通过分析,这种方法容易受到背景干扰。本文采用一种新的测量方法,给尾流气泡后向散射光接收系统前加一个傅里叶变换透镜,可以得到散射光的空间频谱分布,由于散射光的频谱强度服从圆对称的高斯分布,所以只要选取通过圆心的任意一个方向散射光的角谱强度即可表征该高斯分布的所有特征。实验证明,探测气泡的散射光空间频谱分布是一种非常有效的尾流探测方法,并且可以抑止背景干扰。这里采用线阵CCD作为光电转换器件,可编程控制芯片(CPLD)作为时序产生单元,DSP芯片作为高速数字信号处理及控制单元,AD9200作为模数转换单元,USB接口作为系统输出上传单元,构成气泡光散射特性实时探测处理系统。系统工作原理如图1所示。整个系统按照模块化设计方法来设计,使系统的整体结构更加完善和清晰,系统性能得以提高,为调试、维修带来方便。 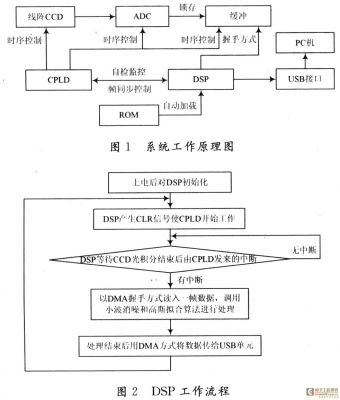
在系统中,为了保证时序的匹配,各部分均运行在一个统一的基本时钟下,由一个外接晶振
40 MHz作为整个系统统一的输入时钟送人CPLD,经CPLD产生CCD的各路驱动时钟信号、
ADC驱动信号、USB和DSP的时钟信号以及CPLD和DSP通信的信号。
A/D的工作频率和CCD的输出频率严格同步以确保不丢失有用的数据。
CCD输出的模拟信号经过A/D转换器转换成数字信号送入系统的处理单元DSP进行处理。
DSP进行信号处理后以12位的分辨率把数字形式的气泡散射空间频谱的峰值和半高宽度值送给USB单元,
通过USB接口实时上传至电脑处理并存储。系统DSP数据处理部分的工作流程如图2所示。
1.2 硬件设计
CPLD选用可编程逻辑器件MAX7128SLC-84,DSP选用ADI公司的ADSP21062。MAX7128SLC-84可以将I/O设置在3.3 V或5 V下工作。因为系统中DSP,AD9200的工作电压均为3.3 V,故CPLD的I/O也设置为3.3 V。然而CCD工作电压为5 V,需要的外部驱动时序脉冲也都为5 V电平模式,而MAX7128SLC-84输出的脉冲信号都为3.3 V,电平不匹配,这里采用ADG3308芯片对MAX7128SLC-84输出的CCD驱动信号作电平转换,使它们从3.3 V变为5 V。MAX7128SLC-84与系统DSP,74AHC574,CCD之间的同步控制如图3所示。
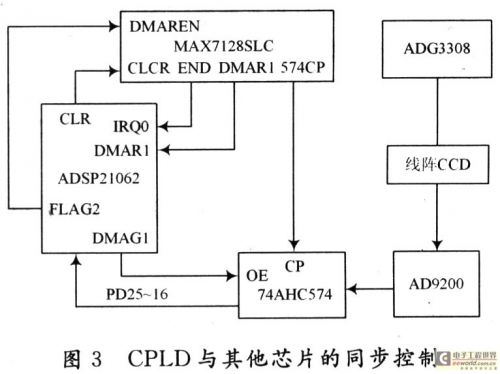
END信号每11 ms产生一个负脉冲作为DSP的外部中断请求信号,低电平有效。CLR信号由DSP产生,作为清零信号,当CLR为低时,则不产生CCD与AD9200的驱动时钟。PCLK是DSP的时钟,与CPLD的输入时钟信号同频,这里PCLK由CPLD产生而不是直接由晶振送入DSP是为了保证整个电路系统在统一的时钟下工作。ADSP21062与74AHC574之间采用DMA握手方式读取数据。74AHC574的CP与OE必须严格进行设置,否则采样数值将有时候发生紊乱。74AHC574的CP信号由CPLD产生,CP滞后DATACLK,在数据有效期内CP上升沿将数据锁存至74AHC574。DMAR1信号由CPLD产生,ADSP21062响应该外部中断请求DMAR1后输出DMAG1信号作为74AHC574的输出使能信号OE,从而以握手方式将数据送到ADSP21062的外部总线上。DSP用FLAG2产生DMAREN以控制DMAR1请求,方便ADSP2106在做数据处理时关断外部中断,防止由其产生的更改内部RAM数据的误操作。
1.3 软件设计
由理论研究的结论可知,散射光空间谱强度服从圆对称的高斯分布,因此,为了得到气泡光散射谱强度分布的峰值和线宽参数,必须对测量数据进行高斯拟合。然而,由于高斯拟合算法无法克服光强饱和的影响,拟合曲线的形状跟真实的谱强度的实际分布往往误差较大,这会影响整个系统的探测精度、作用距离。进一步分析可知,由于信号测量数值起伏不定,还存在一些严重偏离实际数值的杂散点,这些是由CCD器件的噪声引起的,它们也严重影响了高斯拟合算法的效果。小波消噪技术使得信号测量数据值起伏变小,且消除了大部分的孤值点,从而使高斯拟合算法更有效,拟合结果也更逼近实际的谱强度分布。CCD每10.6 ms输出一帧数据,一帧的信号输出大约10 000个,为了提高程序执行效率和运算速度,把经过小波消噪之后的数据再进行压缩,抽取其中500个数据点做高斯拟合处理。通过高斯拟合算法求出散射角谱高斯拟合曲线的峰值、峰值位置以及半高宽度。最后将求得的半高宽度和峰值输出到后续USB接口部分。
- 用于测试数字IC的探测系统(07-30)
- 为测量任务选择合适的探测系统(02-27)
- 阵列式红外探测器在列车轴温监测系统的应用(03-05)
- 基于DSP与AD9852的任意信号发生器 (11-03)
- 多通道数据采集系统(11-12)
- 基于DSP和以太网的数据采集处理系统(01-01)