基于ARM内核单片机的四旋翼直升机飞行控制系统设计
时间:08-22
来源:互联网
点击:
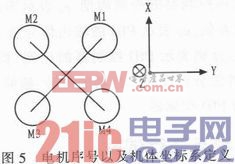
根据上述分析,电机控制信号混控公式如式(1)所示:
其中△φ=φ-φmid,△θ=θ-θmid,△ψ=ψ-ψmid。M1,M2,M3,M4分别表示电机1~电机4的控制信号,T表示油门通道控制信号,φ表示滚转通道控制信号,θ表示俯仰通道控制信号,ψ表示偏航通道控制信号,φmid、θmid、ψmid分别表示滚转、俯仰、偏航通道控制信号的中立值。
3 飞控系统软件设计
3.1 地面站软件设计
为方便监测四旋翼飞行状态,利用CVI软件设计开发了地面PC机惯导数据采集界面,如图6所示。地面PC机通过无线数据传输模块实时接收四旋翼飞行数据,通过该界面显示四旋翼三轴姿态角,加速度,角速率,经纬度及GPS速度等信息,并实时绘制出三轴姿态角曲线。
3.2 控制律软件设计
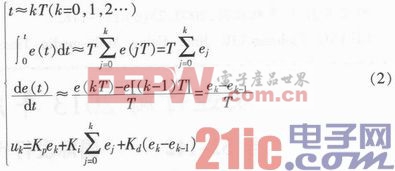
由于PID控制算法成熟稳定,易于实现,因此本方案飞行控制器的设计采用PID算法。由于飞控系统为数字系统,因此采取数字PID算法。数字PID算法如式(2)所示。程序的实现在此就不赘述。
式中T表示控制器的控制周期,ek表示四旋翼飞控指令与反馈信号的差值,uk表示PID的输出信号,k表示控制节拍序号,Kp、Ki、Kd分别表示PID控制器的比例、积分、微分项系数。采用上述算法分别设计飞行器的滚转、俯仰、偏航、定高以及GPS定点的PID控制器。
4 系统实现与飞行试验
依据上述的各个部分完成了飞行器硬件平台的搭建和控制算法程序的编写和调试,并反复进行了试飞调参,最终达到了比较理想的效果,实现了飞行器的全自主GPS定点定高定航向悬停,并且在外界强干扰的情况下能够很好地稳定姿态。飞行器全自主GPS定点定高定航向悬停飞行如图7所示。

文中所设计的四旋翼飞行控制软硬件系统对四旋翼飞行器的飞行控制取得了比较好的效果,通过试飞实验表明,在本飞控系统的控制下,四旋翼具有较好的稳定性,基本达到了设计目标。同时本设计充分利用了STM32单片机丰富的片内资源,程序均采用模块化设计,稍作修改即可很容易地移植到其他飞行器上,具有较好的可移植性,缩短了系统软硬件的开发周期,为下一步搭载实验各类任务设备奠定了基础。
- 基于ARM的综合测试仪设计(05-26)
- 基于ARM核微处理器的便携式管道泄漏检测仪(11-15)
- 用梯度均值法提高LPC2138的A/D分辨率(01-06)
- 基于ARM的信号发生器人机交互系统设计(01-23)
- 基于ARM9的高速数据采集系统的实现(03-04)
- 基于嵌入式Linux的磁场测量系统(03-26)