基于ARM9的高速数据采集系统的实现
摘要:随着雷达、通信、遥测、遥感等技术应用领域的不断扩展,人们对数据采集系统的采集精度、采集速度、存储量等
都提出了更高的要求。针对当前数据采集系统的缺点,提出了基于ARM9的数据采集系统的设计。详细论述了信号调理,时钟产生,数据存储与传输,抗干扰等关键技术及采取的相应措施。经实践证明,该设计方案具有采集精度高,数据采集速度快,数据存储量大的优点。
关键词:高速数据采集系统;ARM;模/数转换器;数据处理
l 引 言
在科研、生产和人们的日常生活中,模拟量的测量和控制是很常见的。为了对温度、压力、流量、速度、位移等物理量进行测量和控制,通过传感器把上述物理量转换成能模拟物理量的电信号,即模拟电信号,将模拟电信号经过处理并转换成计算机能识别的数字量,送入计算机,这就是数据采集。
数据采集的主要问题是采集速度和精度。采集速度主要与采样频率、A/D转换速度等因素有关,采集精度主要与A/D转换器的位数有关。高速数据采集系统的设计需要解决系统在速度、精度、数据存储等方面的矛盾。
2 数据采集系统的结构
本文介绍的数据采集系统采用Samsung公司的S3C2410微处理器。数据采集系统按照功能可分为以下几个部分:模拟信号调理电路,模数转换器,数据采集和存储,时钟电路和系统时序及逻辑电路,如图1所示。

图1 数据采集系统结构图
3 数据采集系统关键技术分析
3.1 系统时钟电路设计
时钟信号的稳定性决定了采样系统的性能。相位噪声和相位抖动是反映时钟稳定性的的两个主要指标。其中相位噪声描述时钟信号的频谱纯度,相位抖动直接影响时钟的过零点。通常高速的AD采样系统采用三种时钟源:锁相环、晶振、模拟混频器。由于锁相环一旦失去基准频率,输出频率会立刻跳回振荡器本身的频率,此外当进行频率调整的时候,输出频率会产生抖动,频差越大,抖动会越大,不利与高速AD采样系统。模拟混频器速度慢,只适合在低频的条件下工作。因此,在高速电路的设计中,一般选择高频晶振作为时钟源。
在高速AD采样系统中,取样时钟的稳定性与信噪比的性能密切相关。任何时钟信号噪声及时钟信号相位抖动都会影响采样系统的精度,时钟信号相位抖动对模数转换信噪比(SNR)的影响,可通过公式计算:

其中:fs为采样时钟频率,N为模数转换器位数,△clk为时钟信号相位抖动量。
3.2 模数转换器的选择
ADC的选择除了要考虑数据输出电平,接口方式,控制时序,参考源,带宽等因素外,最重要的是根据设计需求计算动态指标:信噪比,采样率,满度范围等,从而可以得到ADC的位数、最高时钟频率、模拟输入范围等参数,既可选择所需要的ADC。本设计根据要求:采样频率20 MHz,实时采样20 Msps,转换位数12位,选择了美国AD公司的AD9224芯片。
3.3 模拟信号调理电路设计
被采样的信号经过模拟信号调理电路的低噪声放大,滤波等预处理后,进入输入通道。由于高速数据采集系统的输入信号多为高频信号,需要进行阻抗匹配和前置放大。因此可以选择高速低噪声信号前置放大器和信号变压器。
信号前置放大器的优势是放大系数可变,信号输入的动态范围大,还可以配置成有源滤波器,但是放大器的最高工作频率和工作带宽必须满足系统的需要,以避免信号失真。
信号变压器的性能指标要优于信号放大器,而且信号失真小。但是信号变压器的信号放大系数固定,输入信号的幅度受到限制。
3.4 硬双缓冲实现连续采集存储
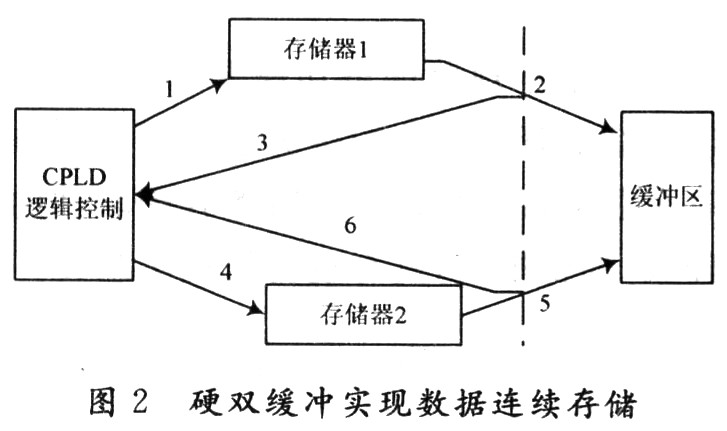
图中序号1~6代表工作流程,采集数据经CPLD控制首先由FIFO写入存储器1,当存储器1数据写满后,产生硬件中断信号,该信号有两个作用:通知微处理器系统数据已经准备好,由微处理器从存储器1取回数据放入缓冲区;通知CPLD控制逻辑关闭FIFO与存储器1之间的数据通道,同时开启FIFO与存储器2之间的数据通道,后续数据得以连续无间断的存入存储器1。此时,存储器1的数据正被微控制器读出,当存储器2数据就绪后,同样产生硬件中断信号。如此交替循环就可以实现采集数据长时间连续无断点存储。
3.5 多路同步采集存储时序分析
要完成多路信号的同时存储且数据连续无间断点、无差错,对时序逻辑的设计提出了较高的要求,本文采用的CPLD器件,利用其在结构、密度、功能、速度和性能上的特点,并配合在线可编程(ISP)技术,实现了精确的时序控制,大大减少线路的噪声和功耗。
对多路信号同时锁存,若不允许丢失数据,必须在单个采集时钟周期内把多通道锁存的数据存入同一存储器中。假设同步采样频率为fs,通道数量为m,每个通道的存储时间为tn(n=1,2,3,…,
- 基于嵌入式Linux的磁场测量系统(03-26)
- 基于嵌入式Windows CE5.0的无线监控系统研究(03-26)
- 基于嵌入式ARM9的墙面平整度检测仪研究与实现(10-18)
- 基于ARM9和3G网络的社区温湿度远程监测系统研究(10-18)
- 基于嵌入式系统的远程参数测量的方法和实现(10-31)
- 基于ARM9和USB摄像头的网络视频采集系统设计(03-30)