飞机刹车控制系统仿真测试平台设计
摘要:针对飞机在地面的快速反应,安全升空和着陆能力,以及飞机刹车系统的性能等问题,将半实物仿真测试技术应用到飞机刹车系统中。建立实物与模型之间的关系,以LabWindows/CVI 2009为仿真开发平台,提出以实物代替模型引入仿真回路,与所建模型形成完整的飞机刹车半实物仿真系统的方法。结果表明:该测试系统与实物仿真相比投资少,效率高,同时又比传统数字仿真更接近实际,是理想的测试手段,为飞机刹车系统的实验研究提供了真实有效的实验平台。
关键词:刹车控制系统;LabWindows/CVI;仿真;测试系统
刹车系统是飞机着陆滑跑的关键系统,承受飞机的静态重量和动态冲击载荷,吸收飞机着陆时的动能,实现飞机的起飞、着陆、滑行、转弯的制动和控制,其性能的优劣直接影响到飞机在地面的快速反应,安全升空和着陆能力,对飞机整体的性能和安全起着至关重要的作用。为提高飞机刹车系统的性能以确保其飞行安全,在实航之前必须对刹车控制系统进行全面准确的地面模拟实验,对其性能优劣与否进行检验。系统仿真是检验飞机系统性能的重要手段,可以模拟飞机在刹车过程的真实环境,以验证刹车系统的性能。系统仿真测试有效的提高其研制质量,节省大量人力,物力,财力,缩短研发周期。
半实物仿真的显著特点是“硬件在回路中”与传统的数字仿真相比,由于试验中实物模型参与整个仿真过程,试验过程中各个环节更逼近真实的状态,试验结果的可信度与参考价值更高,比数字仿真更接近实际,是较理想的研究手段。笔者为此设计了飞机刹车控制系统仿真测试平台,为飞机刹车控制系统的试验研究提供更加有效的试验平台。
1 系统硬件组成
测试平台兼顾飞机刹车系统内外场仿真及测试,主要组成包括:上位机、刹车控制器测试箱、模拟测试断线箱一、模拟测试断线箱体二、刹车系统检测控制器、轮速驱动箱及电源箱,设备功能齐全。其系统组成架构如图1所示。
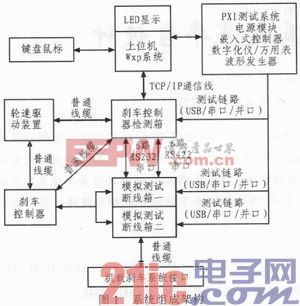
系统中的主要设备功能如下:
1)上位机:在Matlab/Simulink环境下建立模型,完成程序的编译,生成可执行文件,并下载至下位机。
2)下位机:通过I/O设备与上位机通讯,编写上位机程序,对输出的信号逐一分析,实时的完成数据的分析运算,通过相应测试链路接口转发信号至PXI测试设备测试。其中轮速驱动电路产生的信号通过信号线驱动飞机机轮按指定轮速转动。
3)轮速驱动箱:完成对内场轮速驱动的模拟:内场测试时模拟轮速驱动信号,通过调节控制信号使直线电机根据控制信号带动轮速至相应转速,并由传感器采集相应信号传输给上位机,起到模拟机轮转动的作用。
4)成品负载模拟:对机载刹车成品,前轮转弯成品输入输出信号的模拟。
5)模拟测试断线箱:通过跳线开关的通断对需要控制、模拟、测试的信号准确的进行检测和传输。
6)测试链路:集成PXI多功能测试系统,提供信号源,产生3Hz~12KHz、步进1Hz、4ms刷新的任意频率信号,程控电源信号等,并通过示波器,万用表等测试设备完成系统各信号的采集与处理。
7)电源箱:完成对电源的转化,将输入AC220V转化为直流线性正负15 V和标准DC10V、DC28V、DC24V输出。
2 系统软件设计
刹车控制器测试软件要完成系统参数设置,提供数据采集、显示、存储与回放功能,检测控制器的状态、刹车系统综合性能及各附件性能指标,刹车控制器模型的模拟。满足系统要求,方便用户使用,同时软件系统必须具有可靠性、可扩展性及应用性,测试软件采用模块化设计,包括初始化模块、实时界面模块、仿真模块与数据处理模块。功能模块结构图如图2所示。

2.1 开发环境
本测试系统选用LabWindows/CVI2009作为界面开发平台,该软件提供许多形象的控件,使操作界面形象生动,便于用户操作、观察仿真结果,对仿真数据进行存盘,回放等,同时提供丰富的信号处理函数、网络支持、多线程和动态链接库,能开发出跨平台的,支持多线程及网络传输的应用软件。
2.2 部分软件功能模块说明
用户使用该测试系统时,首先进入用户登录界面,输入正确的用户名和密码后,方可登录使用该系统,保证了测试系统数据库的安全性。用户登录界面如图3所示。
用户输入正确的用户名和密码后进入系统的初始化模块界面。
2.2.1 初始化模块
初始化模块的主要功能是:
1)设置实验项目、测试时间、文件存盘路径、操作人员等;
2)设置各路采集信号的参数,仿真模型方式;
3)程序变量的初始化,主要是程序内部全局变量、计算机端口的初始化,保障程序运行时数据的稳定性及准确性。
2.2.2 初始化模块的详细设计
登录系统后,用户进入系统参数配置界面,进行测试前系统各参数的设置和标定。参数配置界面如图4所示。
刹车控制系统 LabWindows/CVI 仿真 测试系统 相关文章:
- 基于速度匹配软件的网络芯片仿真方法(11-06)
- 使用NI PXI和LabVIEW实时模块有效简化硬件在环仿真系统(06-14)
- PCI总线智能GJB289A仿真卡设计(01-06)
- 导入灵活的FPGA验证方法(06-21)
- 测试SDRAM控制器的PDMA(01-04)
- 安捷伦展示3D-EM软件版本整合电路设计流程(05-27)