现代机器视觉技术在安全领域的应用
1 最初的技术
光敏材料可根据有光照与否来更改其阻抗或导电性。早期的黑白视频系统(如上世纪50年代RCA的光导摄像管摄像系统)采用真空管,以通过光敏硒板进行图像传感。
电子束将扫描硒板,产生与光量直接相关的电流,并在确切的时间射向硒板,进而由光栅扫描的显像管产生初步的电子视频信号,便于进行长距离传输。CRT电视再以反序接收信号,通过电子束扫描荧光屏重现图像的对应光等级。
数十年来,视频的用途一直仅限于单色传感与实时显示图像。传感器前的颜色过滤器会将模拟级别设置为组成色度,来创建颜色传感器。电子束路径中的荧光色用于生成彩色。colorburst晶体的出现解决了视频信号中的色彩成分同步问题。
这一稳固的特性逐渐改进了荧光管性能,包括较高的分辨率、较低的功耗、低生产成本以及较高的可靠性。随后闭路电视(CCTV)和广播业便出现了并迅速发展起来。
但也存在一些缺点,即这些技术采用易碎玻璃工艺,并且电路需采用较高的电压。尺寸限制使得基于荧光管的图像传感器一般较大而且笨重。现代半导体技术的出现改变了这一情况。
2 固态传感器
早在1970年初,电荷耦合器件(CCD)就已面世了,它结合了半导体制造工艺与一组规则排列的改良存储器阵列。阵列中的每个光敏像素传感器都会同步设置触发器状态。而这些传感器采用与移位寄存器相似的菊花链架构连接。为移位寄存器提供时钟脉冲将生成同步视频流。
从用于扫描仪和传真机等应用的最初一维传感器阵列,到后来的二维彩色版CCD的出现,视频影像传感器的尺寸已明显减小,也简化了电源要求。
3 摆脱观察员的束缚
由于缺乏录制技术,早期的CCTV系统需要专门的观察人员从检测到的事件中一次性获取尽可能多的信息。之后,图像便永久消失了。
这类CCTV系统是由人来识别模式、发现目标,并决定是否需要发出警报。可以说人就是报警回路中的控制处理器,拥有是否触发警报器的一票决定权。
线性CCD传感器借助于设定好的条形码读取和识别模式功能改变了这种状况。现代的手机、摄像机以及机器视觉系统中所采用的二维传感器提高了分辨率和光谱敏感度,同时减小了尺寸和功耗,并且不需要使用外部镜头。
机器视觉加入了人工智能元素,成就了新一代强大的监控系统,现在只需较少的人员、较低的成本和更高级别的目标设定检测(和跟踪)。这些要求增大了工程师的设计难度,要求他们能集成较高的功能级和前所未有的处理能力。
4 设计时面临的问题与困扰
没有现代存储器的速度与密度以及现代嵌入式处理器的强大功能,下一代智能监控系统将无法实现成本与尺寸的提升。负荷量是其中一个主要原因,因为图像分辨率的每次提升都会影响到其他的系统设计。
早期的8位4 MHz传统处理器能够帮助设计人员开发数字控制回路,且其数字技术能够用于信号处理与实时控制,但速度上却无法满足智能安全领域的需求。究其原因最终归结于存储器需求的爆发性增长。
例如,一个简单的传统混合视频摄像机共有525个扫描行,每行的采样速率都可以不一样。其中的21行用于垂直消隐。现代的CCD影像传感器最低数字分辨率为¼ VGA (320 x 240)。
¼ VGA分辨率需要76,800个字节来呈现一个帧(8位分辨率时)。8位RGB(红、绿、蓝各占一个字节)最多支持230,400个字节。在这两种情况下,均超出了传统处理器的处理范围。
存储器需求随着分辨率的增大也会大大提高。即使是640 x 480的VGA分辨率,一个单色帧就需要307,200个字节,而在24位彩色模式下的彩色帧则需要将近1MB。
问题并不仅仅于此。对于30帧/秒的传输速率(典型的闪光融合速率),几乎需要28MB来缓存一个一秒的VGA视频。下表中对几个常用视频标准分辨率进行了比较,进一步说明了这一不断增长的需求限制。
5 难以置信的处理器技术
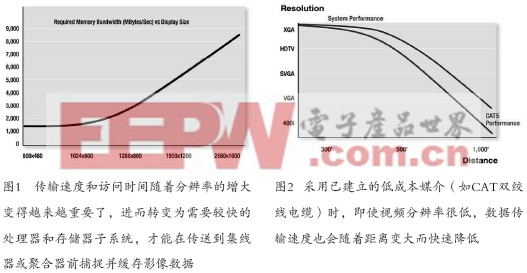
随视频技术的进步进而带动了一些先进的处理器系列与架构的出现,它们已可用于设置硒板和应对下一代智能监控和视频设计。无论哪种情况,都将使用外部总线接口以及可能的高速外部DRAM。最先进的处理器可处理几十亿字节的存储器寻址问题,并支持DDR和SDR等多个同步高速存储器接口。因此,设计人员在构建系统时需非常注意存储器带宽。
需求不同选择的处理器也会不同,也就出现了这两个重要应用。设计中央集线器和/或聚合器需要超高端、甚至是多核处理器,具有DVR功能,以及非常深的易失性和非易失性存储器池。但是,真实的摄像机还有一些内在限制,包括较低的功耗、扩展级温度范围以及较小的尺寸。
STMicroelectronicsSTM32F051K4U6TR Cortex M0处理器采用32位ARM架构
- 晶体管的检测经验(09-17)
- 测量光耦响应时间的简单电路设计(05-11)
- 光电式车速传感器的识别与检测(02-18)
- 传感器技术中的阻抗测量方法(03-23)
- 电桥测量基础(06-10)
- 适用于微型仪器的精密电容传感器接口(09-06)