红外遥测式路面状况传感器的水厚度测量
1 概述
路面状况传感器根据水、冰、雪的不同红外光谱特性,通过对干燥路面反射的光谱信息和有覆盖物的情况下得到的光谱信息的对比,实时检测路面的干、潮、积水状态,测量水、冰、雪的覆盖类型和覆盖厚度。克服了现有接触式路面状态传感器安装复杂、维护困难的缺点,而且具有实测面积大、目标更直接、路况信息更真实的优点。本论文详细阐述了多光谱在路面水厚度检测的应用。
2 传感器检测原理
2.1 测量波长的选择
红外光照射在水冰雪上发生散射、吸收、反射、折射等一系列作用[1],路面状况根据水吸收光谱、冰吸收光谱、雪散射光谱筛选出三个波长红外光,λ2和λ3处于水和冰的吸收峰,由于照面表面反射及水分子和固体颗粒对光信号的吸收和散射共同作用,实测到的后向散射信号的表现如下,其中水对三个波长的主要为反射和吸收,后向散射系数λ1>λ3>λ2;冰对三个波长的后向散射系数λ1>λ2>λ3;雪对三个波长的后向散射系数[2]λ1>λ2>λ3;根据三个后向散射光信号与路面干燥时光信号的比值的大小及差值,可以定性分析路面状况、计算出水冰雪厚度。
2.2 硬件电路结构
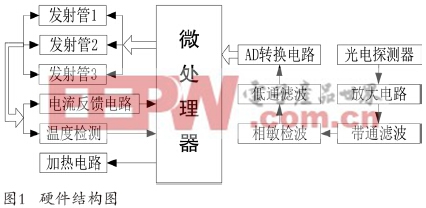
传感器使用单色性好、体积小、工作电压低的激光二极管提供阵列式红外光源,以脉冲调制波发射红外光束,利用反馈电流稳定光功率[3]、温度补偿稳定光谱;光电二极管接收反射回来的微弱的红外光信号,利用两级电路进行滤波、放大,然后进行AD转换,送入微处理器,进入模型计算(如图1)。
2.3 检测理论支持
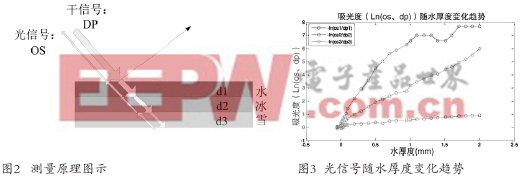
将传感器以一定角度架设在路边,在路面干燥时进行干标定,获得干参数DP1、DP2、DP3,一旦传感器位置角度等变化都会引起干参数变化,需要重新进行干标定。各条件不变时干参数相对稳定,传感器有干信号自动调整功能,补偿路面和镜头污染引起的干参数的微量变化;各条件不变化时,一旦路面潮湿、积水、结冰、积雪,入射光由于照面表面反射及水分子和固体颗粒对光信号的吸收和散射共同作用,实测到的三个后向散射光信号表现出不同的特点,根据三个信号的大小关系可以判别路面状态(如图2),根据判断的覆盖物种类进入不同的厚度计算公式;根据物质的吸光度可以计算覆盖物厚度,测量理论基础为修正的朗伯-比尔定律,采用三波长测量能够减小覆盖物颗粒度等引起的测量误差,比单波长进行更精确的测量[4]。
基础朗伯(Lambert)定律阐述为:光被透明介质吸收的比例与入射光的强度无关。在光程上每等厚层介质吸收相同比例值的光。 基础比尔(Beer)定律阐述为:光被吸收的量正比于光程中产生光吸收的分子数目。
Ln( Io/I)= εCd (1)
公式1中:Io—入射光强度;I—通过样品后的透射光强度;ln(Io/I)—称为吸光度;C—为样品浓度,我们测量的是纯物质,C=1;d—为光程;ε—为光被吸收的比例系数,它与吸收物质的性质及入射光的波长λ有关。
适用于本传感器的原理公式为:
Ln( os/dp)= εd+k (2)
公式2中:dp—干信号;os—有覆盖物时的光信号;d—覆盖物厚度;k—常数,路面等条件的影响。
道面状况传感器采用的是三个波长的阵列光谱法,根据水冰雪对三个波长的光信号具有不同的吸光系数,可以判断覆盖物类型;根据物质的吸光度可以计算覆盖物厚度[4]。
公式推导:
干标定信号:DP1、 DP2、 DP3;接收信号:OS1、 OS2、 OS3;厚度:d1、d2、d3;水对三个波长的吸收率为:ε11、ε12、ε13;冰对三个波长的吸收率为:ε11、ε12、ε13;雪对三个波长的吸收率为:ε11、ε13、ε13。

分析结果:选择多元线性回归方法分析数据,假定被解释变量与多个解释变量之间具有线性关系,是解释变量的多元线性函数,称为多元线性回归模型。即
Y=β0+β1 X1+…+βk Xk+μ
其中Y为被解释变量,Xj(j=1,2,…,k)为第j个解释变量,βj(j=1,2,…,k)为第j个未知参数,μ为随机误差项。
由以上推导可知,只要有足够代表性的数据,就可以求出对应水冰雪厚度的3组系数,达到物质辨别和测量厚度的目的。
3 水厚测量试验
通过对多种石材的强度和亲水性进行试验考察,选定用特制的铺有水泥面的花岗岩精密平台作为水标定试验的标准平台,以高精度磁致伸缩液位传感器作为水厚度检测标准,以人工和摄像头作为辅助观测方法。
通过多次试验总结出水标定可行的试验方法:
首先将试
- 传感器技术中的阻抗测量方法(03-23)
- 电桥测量基础(06-10)
- 适用于微型仪器的精密电容传感器接口(09-06)
- 基于PIR的移动检测系统的实现(11-03)
- 基于霍尔传感器的直流电机转速测量系统设计(11-14)
- NPXI智能传感器的TPMS系统设计(11-29)