基于ANFIS的温湿度控制
过梯度下降法不但可以降低搜索空间的维数,还可以很好的提升参数的收敛速度。
本网络系统中需要考虑的学习参数主要是条件参数{mji,σji}和结论参数{aji,j==0,1,2;i=1,2}。
定义目标函数为
式中:d为系统期望输出或者教师信号。
误差信号由第5层依次反向传递至第1层,具体算法:

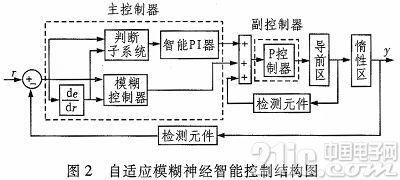
4 自适应模糊神经控制器设计
图2为根据自适应模糊神经网络控制的控制器,此控制器不但保持了常规串级控制,而且采用主、副控制器。主控制器使用一个模糊神经控制器和一个智能PI控制器来控制系统,副控制器仍然采用P控制器。
输入变量的线性组合为自适应模糊神经系统的模糊规则,即:

式中:i=1,2,…,n;j=1,2,…,m;Rj为第j条模糊规则所表示的模糊蕴含关系;![]() 为xj的第j个语言变量值,pj的后件网络的连接权值。如果输入量使用单个模糊化的方法,则对于系统给定的输入x,可以求得关于每条规则的适应度为
为xj的第j个语言变量值,pj的后件网络的连接权值。如果输入量使用单个模糊化的方法,则对于系统给定的输入x,可以求得关于每条规则的适应度为
![]()
式中:
是第i个输入分量隶属于第j个语言变量模糊集合A的隶属度函数。
模糊系统的输出量为每条规则的输出量的加权平均,即

aj为对于给定的输入x所求得的对于每条规则的适应度。
智能比例积分(PI)控制器是具有PI环节和使能端的逻辑判断子系统的2个模块组成。系统所处的状态通过逻辑判断子系统和的符号来判断,从而控制P1环节是否有效。定义误差e=r-y,误差变化率ec,当e·ec>0或e=0、ec≠0时,PI控制器功能有效,主控制器由模糊神经网络控制器和PI控制器共同作用控制实现,而当e·ec0或ec=0时,PI控制器功能失效,主控制器模块由模糊神经网络控制器单独来控制。结合经验知识,在仿真过程中通过对系统调试,最后确定的参数kp=1.2,ki=100。
5 ANFIS的仿真结果
温度的偏差e和偏差变化率ec(湿度的偏差e和偏差变化率ec)为控制器的两个输入变量,E、EC为其对应的模糊化变量,[-6,+6]为E和EC的基本论域。通过查询常规温度模糊控制系统的训练样本表格和数据,神经模糊推理编辑器将训练所得到的样本数据载入训练数据集,7定义为输入变量的隶属度函数的数目,类型为高斯型,输出变量的隶属度函数
类型为常数型.假设训练的最初步长为0.01,目的误差为0,最后模糊推理系统经过400步训练后生成。为了形成对比本文对常规PID控制器和本文所研究的自适应模糊神经网络控制器,在无外界扰动和有外界扰动的两种情况下,进行了仿真,仿真结果见图3和图4。
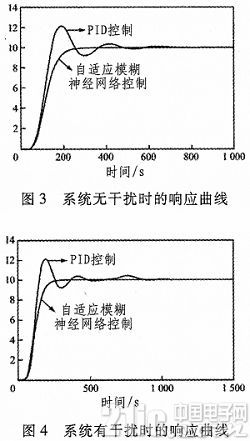
从图片的结果可以看出,自适应模糊神经网络控制器拥有良好的动、静态特性和抗干扰能力,同时该控制器性能明显比常规PID控制器要好,实现起来比传统的PID控制简单且基本没有超调。
6 实际应用
本文采用Sensirion公司的SHT75温湿度传感器,该产品是该公司推出的一种插针式同时具有高精度版本的温湿度传感器。SHT75经过完全标定,传感器具有高质量以及能够提供高精度数字输出。同时该产品是80uW的低能耗,相对温度工作范围:-40~+125℃,具有±0.3℃的精度。湿度工作范围:0~100%,具有±1.8%RH的精度。
该控制器在现场使用时,根据SHT75测量的温度值,反馈到系统显示界面,根据反馈的数值决定设备是工作还是不工作。最终了解到随着时间的不断延长,自适应模糊神经网络控制能够将该系统的温度维持在一个比较理想的范围内。
7 结论
针对温湿度控制系统存在的延时时间长、惯性强等特点,本文所研究的自适应模糊神经网络的控制方法不仅克服了常规PID控制具有的自适应能力差的缺点,而且本文采用的模糊控制器解决了常规的模糊控制器存在的稳态精确度低和模糊系统规则难以把握等缺点。该控制方法不仅仅对于本文提出的温湿度控制系统有效,同时对于复杂的被控对象也能取得比较好的控制效果,能够展现出比较好的系统稳定性、抗外界干扰性和系统动态特性等优点,具有较高的工程应用价值。
- 用串行RapidIO交换处理高速电路板设计的信号完整性问题(04-28)
- 比例式AC电源控制器适量输出AC线路的周期(11-04)
- 小型温控系统的研究(02-17)
- 数字测试仪下的参数测试单元的设计(04-09)
- 基于发动机性能虚拟仪器测试系统设计(05-12)
- 一种应用于足浴器的温控器的研制(07-14)