基于C8051F040水下平台姿态监测电路设计
如图4所示。

系统软件设计主要包括5部分程序:软件初始化配置程序、RS232串口数据提取程序、CAN通讯数据程序、深度A/D转换程序、RS422串口数据发送程序。
2.1 GPS数据提取程序设计
GPS数据系统的数据分较多种类,其他类型的数据不包含有航向和纬度值,只有“$GGCX”开头的数据表明该组数据才有效。因此针对系统需要,处理“$GGCX”开头的数据即可。“$GGCX”数据是以字符串形式呈现,为此接收“$GGCX”数据后,需将其对应的字符串转换成数值。“$GGCX”数据中纬度是否有效,航向是否有效,需要提取出纬度和航向同时有效的数据,纬度和航向是否有效的标识在第11个逗号后面的一个数字表示(0表示数据无效;1表示纬度或航向有效;2表示纬度和航向同时有效)。
2.2 姿态数据程序设计
姿态数据是通过CAN通讯设置陀螺系统相应的数据格式及发送方式。陀螺系统上电后,等待30 s后发一个暂停的信息。
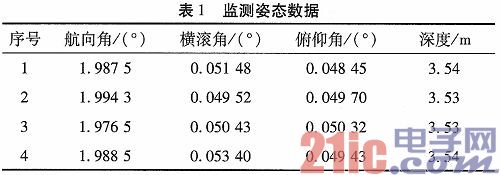
GPS数据提取中,一旦发现纬度和航向同时有效时,将其对应标识置位并将其航向和纬度提取出来。再通过CAN将其航向和纬度发送到陀螺系统中再发送一帧启动的命令即可。此后陀螺系统便以0.2 s的周期发送平台的航向角、横滚角、俯仰角。
2.3 深度数据获取程序设计
根据实际使用情况可以直接使用C8051F040器件内部集成的12位A/D模块进行转换。A/D模块转换启动方式采用相应的定时器溢出启动。为保证转换正确性将其转换10次取其平均值作为其一次深度数值。
最后将陀螺系统的姿态数据和深度值按照一定的协议通过串行通讯接口RS422以0.5 s的周期发送出去。
3 结束语
该电路既有模拟电路又有数字电路部分,因此电路设计考虑数字地与模拟地分开。数字地与模拟地采用单点连接,这样在进行模拟转换过程中也发现转换的深度值最大偏差有8 m。调试发现模拟地有很多杂波,处理方法是在模拟地与外壳之间加一个耐压500 V,0.1μF的聚酯电容,经处理后深度值偏差降低约0.3 m。
该电路设计已应用到某平台姿态数据监测中,并成功运用某型水下释放试验中,试验取得较好的效果。
姿态监测 A/D转换 RS422串口通讯 深度值 相关文章:
- 基于AT89S52多路数据采集系统的设计(08-22)
- 探头可更换的智能磁场测量仪的研制(10-02)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)