探头可更换的智能磁场测量仪的研制
基于霍尔效应的磁场测量方法灵敏度高、适应范围宽,既可测量恒定磁场,又可测量交变磁场。但在使用过程中,霍尔探头容易由于人为因素造成损坏,这样就需要更换新的探头。然而不同探头在相同电流下灵敏度不同,需要重新定标。定标过程比较复杂且需要较高精度的专业定标设备,一般用户不具备这种条件。现在国内的同类产品多是在交付用户使用前完成定标,一旦探头损坏就只能返回重新定标。
本文介绍一种更换探头后可自动重新定标且具有较高测量精度和较大测量范围的磁场测量仪的硬件组成和软件结构。该测量仪可以完成对稳恒场,脉冲场峰值,交变场正负峰值、峰峰值及其频率的测量,同时具有自动测量功能。 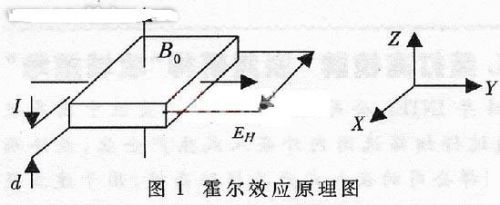
1 测量原理
霍尔效应的基本原理如图1所示。在Y方向通以电流I,并在Z方向施加磁感应强度为90的磁场,那么载流子在X方向受到洛仑兹力作用而在两端产生霍尔电动势EH。根据霍尔效应制造的霍尔器件是具有一定形状的半导体薄片,其霍尔电动势为:
EH=RH(IB0/d)(1)
式中,RH为与材料有关的霍尔系数,d为霍尔器件的厚度,I为流过霍尔器件的电流,Bo为外磁场的磁感应强度。对一个霍尔器件而言,在电流I恒定的情况下,EH与外磁场Bo成正比,设比例系数K=RH 。因此,对于不同的霍尔传感器,可以通过改变工作电流I,使其具有相同的比例系数。
霍尔器件的定标就是确定霍尔电动势EH与外磁场Bo的比例关系。所以在霍尔器件的线性区,可以通过改变工作电流I,使其达到预先设置的霍尔电动势EH与外磁场Bo的比例关系,从而完成线性区的定标。把对应工作电流下的非线性区霍尔电动势与外磁场Bo作成数据表格存储在一个串行的E2PROM中,测量时就可以通过查表和线性拟合的方法求得外磁场Bo。因此,只需在霍尔器件探头上封装一个串行E2PROM,将该探头的工作电流和对应的非线性区表格存储在其中即可。更换探头后磁场测量仪的CPU可以从E2OPROM中取得该探头的工作电流,然后调节一个可控的恒流源完成定标工作。
2 硬件设计
该仪器的硬件电路主要由主控电路、定标电路、信号处理与采集电路、频率测量电路等组成。
2.1 主控电路
主控电路以AT89C52为核心,包括一个双通道A/D转换器MAXlll[1]、两个D/A转换器MAX541[2]、经8279扩展的键盘显示电路、一个定标参数存储器X24128[3]以及与上位机通讯的RS232接口。为了减少干扰,在模拟电路与数字电路之间加有光电隔离电路。
A/D转换器MAXlll的一路用来检测调零电路输出,另一路用来采集保持后的感应电压信号。两个D/A转换器MAX541中的一个用来输出霍尔不等位电势的补偿电压,另一个用来控制压控恒流源。
经8279扩展六个按键:电源键、定标键、调零键、量程转换键、自动测量键、显示暂停键,键盘以中断方式工作。同时经8279扩展出双8位的数字表头,一个用来显示交变磁场频率,另一个由软件控制根据不同的磁场显示不同数值。当测量稳恒场时,显示磁场值;当测量脉冲场时,显示峰值;当测量交变磁场时,由软件控制依次显示正、负峰值及峰峰值,显示时间间隔由软件控制为5s,当按下显示暂保持键时,保持当前显示数据,再次按显示保持键,显示下一个数据。
参数存储器X24128与霍尔器件封装在一起,通过串行总线和主机相连。
2.2 定标电路设计及工作原理
定标电路主要由一个压控恒流源和提供控制电压的D/A转换电路组成。压控恒流源[4]由两个高阻型双运算放大器LM358构成,其原理图如图3所示。 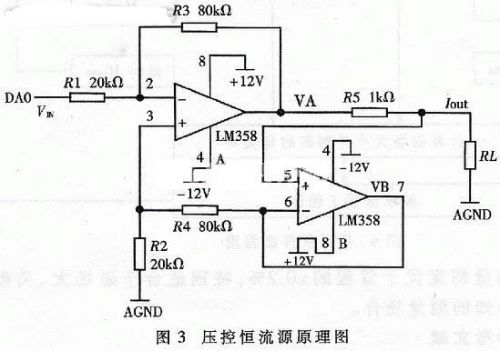
从图中可得出:
Iout=-4VIN(mA)
式中,VIN由16位D/A转换器MAX541提供,可在0~2.5V之间以0.04mV的分辨率调节。那么恒流源电流可在0~10mA之间以0.161μA的分辨率调节,完全可以满足一般霍尔器件的恒流工作要求。
2.3 信号处理与采集电路
为了对不同类型磁场进行高精度测量,本系统信号处理电路由程控放大电路、数字调零电路、峰值检测与保持电路组成。处理后信号的采集由MAXlll通道1完成。
2.3.1 数字调零电路
由于制作工艺的原因,霍尔器件总有不等位电势存在。为了适应自动测量的需要,不等位电压的补偿由数字调零电路实现,其原理图如图4所示。该电路实际上是由两个运算放大器构成的加减运算电路。在系统初始化时,对不同量程进行调零,并将对应的补偿电压数值存在RAM中;测量过程中量程转换或手动选择量程后,可直接查询相应的数值,由D/A转换器输出补偿电压。由于采用了高精度的A/D和D/A转换器,调零后的不等电位小于0.1mV。
2.3.2 峰值检测与保持电路
为了测量脉冲磁场和交变磁场的峰值,本系统含有由采样保持器LF398[5]和逻辑
- 利用Fluke 87V数字多用表测量调速马达(06-08)
- 霍尔传感器在测量系统中的应用(08-12)
- 基于霍尔传感器电参量测量系统的设计(08-13)
- 载流子迁移率测量方法总结(10-11)
- 导电材料电阻率的三种经典测量方法(09-30)
- 基于示波器作为测试开关电源测量的平台研究(01-20)