基于C8051F040水下平台姿态监测电路设计
目前,水下平台支架一般与船体固连在一起而水下平台姿态的监测系统放在船上,这样会出现一个问题:监测到的平台姿态数据是否反映平台姿态真实数据。
为此设计了基于C8051F040水下平台姿态监测电路,本监测电路和相关敏感元件一起固连在水下平台上。这样能更准确地反映出平台姿态及相关数据。本系统提取姿态数据主要通过航姿陀螺系统,而该陀螺系统启动需要一个初始纬度和航向角才能进行解算出平台实时的航向、横滚、俯仰。
1 系统硬件结构
基于C8051F040姿态监测电路系统部分由6个主要功能模块组成:电源模块、陀螺系统、深度传感器、GPS数据系统、单片机C8051F040和RS422串行通讯。电路系统结构框图如图1所示。
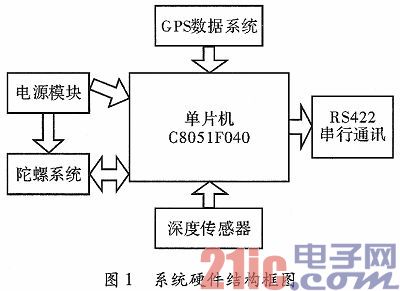
电路系统结构框图工作原理是首先将GPS数据的航向角、纬度通过串口RS232发送到控制器系统。控制器经提取转换将其纬度和航向角下载到陀螺系统作为初始启动值,同时对陀螺系统通讯方式进行设定。此后陀螺系统能周期发送实时平台姿态数据。深度数据由深度传感器经信号调理电路直接到C8051F040内部AD模块获得。控制器将这些数据通过RS422串行通讯接口定时发送出去。
1.1 GP8数据系统介绍
GPS数据系统功能是接收经度、航向角、UTC时间等信息,并通过RS232通讯口发送至单片机。通过集成的单板式结构的双频双系统定位定向板卡DB982,实现厘米级的定位精度,定向精度1°。单片机软件完成对GPS数据提取、数据转换以及数据下载到陀螺。
该系统的GPS数据系统由两个圆盘型天线以及数据接受处理器构成。数据接受处理器以0.2 s的周期向外发送GPS数据。
1.2 陀螺系统及应用介绍
该陀螺系统采用的光纤陀螺,其工作原理是基于萨格纳克(Sagnac)效应。萨格纳克效应是相对惯性空间转动的闭环光路中所传播光的一种普遍的相关效应,即在同一闭合光路中从同一光源发出的两束特征相等的光,以相反的方向进行传播,最后汇合到同一探测点。
若绕垂直于闭合光路所在平面的轴线,相对惯性空间存在着转动角速度,则正、反方向传播的光束走过的光程不同,就产生光程差,其光程差与旋转的角速度成正比。因而只要知道了光程差及与之相应的相位差的信息,即可得到旋转角速度。
该陀螺系统供电为24 V,通讯方式为CAN通讯。陀螺上电成功后通过相关CAN指令设置其相关的数据通讯方式,并初始化当前纬度和航向角后,陀螺系统将上传航向、横滚、俯仰等姿态数据。
1.3 深度传感器调理电路
深度传感器输出的电压信号,范围为0~5 V。由于单片机C8051F040的内部基准电压只能设置到2.4 V,为能保证其0~5 V模数转换,需进行电路调理。具体电路如图2所示。
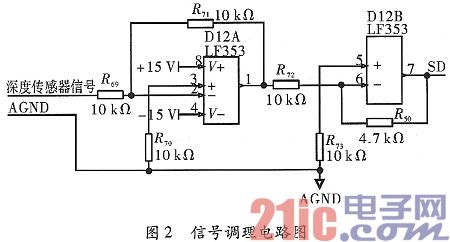
VSD=(R71/R69)×(R50/R72)×V信号 (1)
将其理论数值计算到上式可得到
VSD=0.47×V信号 (2)
当模拟信号达到最大值5 V时,VSD经上式计算得到2.35 V小于其基准电压2.4 V故满足A/D转换要求。因此,可直接将VSD送到单片机C8051F040的A/D转换端。
在电阻精度选择,为减少调理电路中电阻实际值偏差造成理论计算值与实际数值之间的偏差。根据式(1)计算,可选择精度在1%的精密电阻。
1.4 防冲击可靠RS422通讯电路
RS422采用的是差分传输方式,抗干扰能力强,但若仅是简单的采用一般的设计方案。在恶劣的工业环境下仍会出现接口故障甚至损坏,因此有必要从软硬件上面引入更多的抗干扰、保护、侦错等措施来提高接口的可靠性。本文考虑应用环境下RS422串口热拔插损坏的原理,在此基础上,提供一种RS422防冲击可靠通信电路。具体电路如图3所示。

RS422标准规定接收器门限是为±200 mV,当当接收器A电平比B电平高+200 mV以上时,输出为正逻辑,反之,则输出为负逻辑。但由于第三态的存在,即在主机在发端发完一个信息数据后,将总线置于第三态,即总线空闲时没有任何信号驱动总线,使AB之间的电压在-200~+200 mV直至趋于0 V。这带来了一个问题:接收器输出状态不确定,故应采取一定不确定状态。通常是在总线上加偏置,当总线空闲或开路时,利用偏置电阻将总线偏置在一个确定的状态(差分电压≥-200 mV)。
常见的RS422通讯接口只对低频率的共模干扰有保护作用,对于频率很高的瞬态干扰则无效。设计采用方案是旁路保护方法,利用瞬态抑制元件TVS将危害性的瞬态能量旁路到大地。
2 软件设计
整个软件设计是姿态及深度数据获取转发为核心。姿态数据获得需GPS系统数据的航向和纬度下载到陀螺系统后,陀螺数据通过CAN接口发送给单片机。深度数据通过启动A/D转换获得,将转换后的深度数据和陀螺姿态数据按照一定协议通过串口RS422发送出去,具体软件流程框图
姿态监测 A/D转换 RS422串口通讯 深度值 相关文章:
- 基于AT89S52多路数据采集系统的设计(08-22)
- 探头可更换的智能磁场测量仪的研制(10-02)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)