脉宽调制(PWM) 马达驱动器电源的测试分析(上)
时间:01-12
来源:互联网
点击:
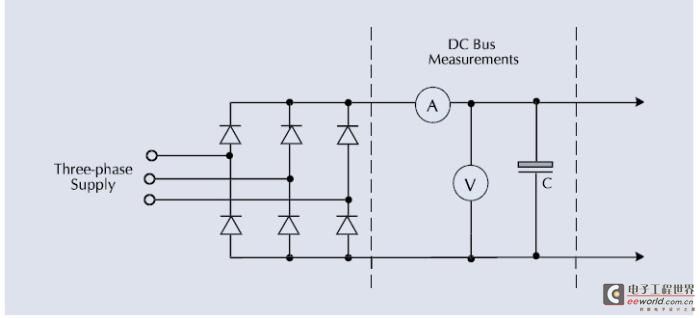
表3. 直流总线关键测量参数
如果独立进行直流总线测量,可以利用分析仪的CH1(通道1)。不过,直流总线测量往往与驱动器输入或输出的三相二线测量一起进行。在这种情况下,应当使用剩余独立运行通道中某个通道对直流总线进行测量。
例如,将CH1和CH2连接,进行输入或输出测量。CH3与直流总线相连,如图5所示。使用F[7]选择脉宽调制马达驱动器输入或输出模式,并启动独立的CH3。
7.驱动器输入测量
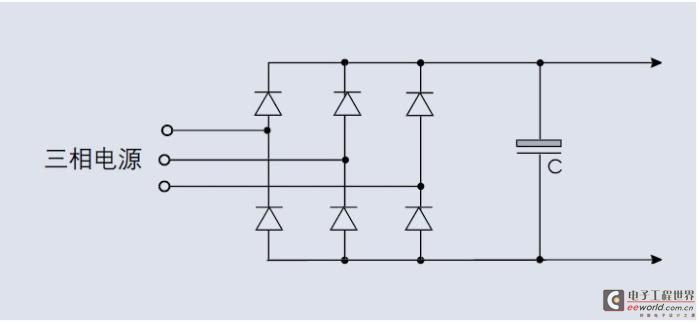
从本质上讲,大多数脉宽调制马达驱动器输入电路是三相二极管整流桥,并包含电容滤波器,如图6所示。
每个输入相的电流波形由为存储电容器充电的脉冲组成。图7给出某相的电流波形,它包括电源频率的基波分量以及大量谐波分量。

图7. 脉宽调制驱动器输入端电压和电流波形
如果驱动器的逆变器部分为输入电路提供一个恒流负载,那么每相的输入电流将是一个振幅恒定的失真波形,如图7和图8所示。
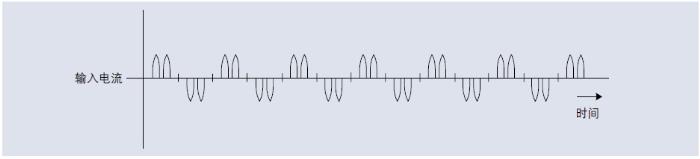
图8. 未经调制的输入电流波形
遗憾的是,脉宽调制驱动器的逆变器部分可能不向输入电路提供恒流负载;在这种情况下,从电容器吸收电流的负载电流将受到输出频率分量的影响。这意味着,来自交流电源的电流在工频频率是复杂的、失真的电流波形,它由驱动器频率进行调制。图9给出其波形。调制可能严重影响测量,特别是在低驱动速率,不过,利用扩展的测量区间(为驱动器输出波形周期整数倍),可以解决这个问题。
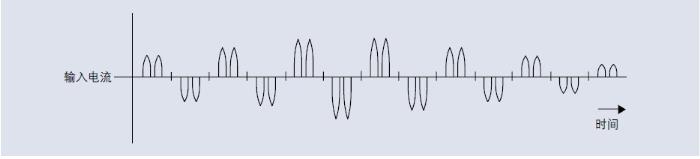
图9. 在输出频率处进行调制的输入电流波形
PA4000 支持脉宽调制驱动器输入功率的精密测量,即使马达处于低频时。输入功率测量与交流工频同步,但通过调节显示屏更新速率及均值设置,可以扩展测量区间。

表4. 选择显示屏更新时间和均值,把驱动器输出频率对驱动器输入功率测量的影响降到最小
对于超过20 Hz的输出频率,PA4000的默认设置通常将给出稳定结果。默认设置是:
显示屏更新速率:0.5 s
平均:10
当输出频率在5 Hz~20 Hz之间时,将均值设置为10,以改进稳定度;对显示屏更新时间进行设置,使之包括测得的脉宽调制输出周期(1/f)的整数倍。根据经验法则,应提供10个周期。
例如:
输出频率= 5.5 Hz
显示屏更新速率= 10/(5.5 Hz)= 1.8 s
对于低于5 Hz的输出频率,使用最长的显示屏更新速率(2 s),平均为10。
例如,对单相驱动器进行测量时,如果读数太大,可以将均值设置为10以上,以帮助使测量稳定。
分析仪通过三相三线配置进行连接,如图10所示(即所谓的两表法,关于利用n-1台功率表可以测量通过n条线路向系统提供电源的证明,请参见应用指南:三相测量原理)。
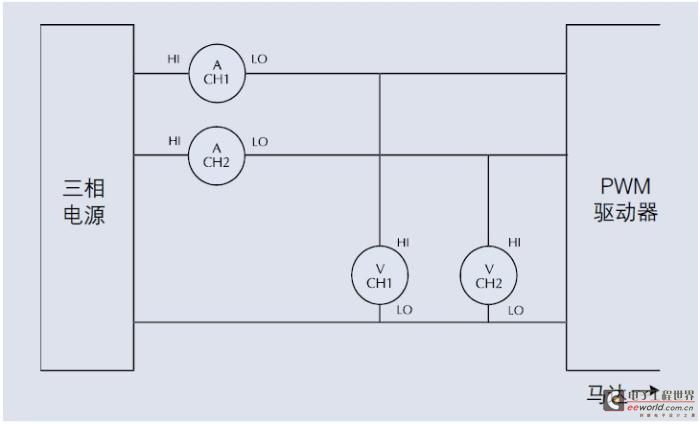
图10. 三相三线连接
在这个线路配置中,可能使用分析仪的第三通道和第四通道,以测量驱动器输出或驱动器内的直流总线。
脉宽调制PWM马达驱动 相关文章:
- 脉宽调制(PWM) 马达驱动器电源的测试分析(下)(01-12)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)