脉宽调制(PWM) 马达驱动器电源的测试分析(上)
时间:01-12
来源:互联网
点击:
1.概述
自电机工程诞生以来,三相交流马达一直是工业领域的主力。它们可靠、高效、费效比高,需要少量维修或根本不需要维修。此外,交流马达(如感应马达和磁阻马达)无需与转子的电气连接,因此很容易实现阻燃,用于危险环境(如矿山)。
为了提供适当的交流马达速度控制,必须为马达提供三相电源,其电压和频率可以变化。这种电源将在定子中形成一个变速旋转磁场,使得转子按照所需的速度旋转,且滑动很小,如图1所示。这个交流马达驱动器可以高效提供从零速到全速的全转矩,如果需要的话,还可以超速,而且通过改变相位旋转,可以很容易使马达双向运转。具有这些特点的驱动器称作脉宽调制马达驱动器。
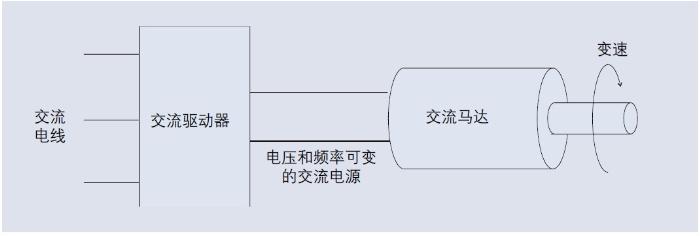
交流马达驱动系统示意图
脉宽调制驱动器可以生成复杂波形,如在到马达的输出上,以及到驱动器的电源上。本博文将分两部分,探讨马达驱动器的电气测量话题。
2.对脉宽调制马达驱动器的测量
表1给出了脉宽调制马达驱动器的典型测量。

表1. 常见的脉宽调制马达驱动器测量
3.马达输出测量
图1说明,通过在马达输出轴安装转速和转矩传感器,可以对马达输出进行测量。

图1.马达输出测量
3.1转矩和转速传感器
转矩和转速传感器生成的电信号与转矩和转速成正比。通过测量这些信号,可以确定马达的转速和转矩,从这些测量结果中可以计算马达输出功率。
3.2转矩
马达转矩是在其输出轴上形成的旋转力,它是一个扭力,其单位是牛顿米(Nm)或英尺磅(1英尺磅=1.3558 Nm)。对于小型马达而言,其转矩额定值低于1 Nm;对于大型马达而言,其转矩额定值达到几千Nm。
通过旋转应变计以及利用固定接近、磁致伸缩和磁弹性传感器,可以测量转矩。这些传感器都是温度敏感型的。旋转传感器必须安装在转轴上,由于空间受限,这并非总能行得通。
为测量转矩,应变计往往直接安装在转轴上。由于转轴旋转,转矩传感器必须通过滑环、无线通信或电感耦合与外边世界耦合。
3.3转速
马达转速通常以每分钟转速(RPM)来描述,即它在1分钟内沿固定轴旋转的完整圈数。
转速传感器输出可能是一个与转速成正比的模拟电压。更普遍的是,转速传感器输出是一个由马达转轴上圆盘生成的TTL脉冲。通过测量TTL信号频率,并应用比例因数,可以确定马达转速。
例如,如果转盘每转一圈生成n个脉冲,那么每分钟转速(RPM)可以计算为:

3.4实现转矩和转速测量与电气测量相结合
为了确定马达和驱动器组合的效率,必须考虑系统的电气输入以及在马达输出端生成的机械功率。马达输出功率是转矩和转速的乘积:
马达输出功率(W)=转矩(Nm)× 转速(弧度/秒)
= 转矩(Nm)× 转速(RPM)×
注意:1ft-lb=1.3558Nm(牛顿米)
1HP=745.7W
通过以下公式,可以计算系统效率:
为了进行这些测量,PA4000包括传感器输入端,用于连接转矩和转速传感器。通过测量驱动器输入端消耗的电力、以及马达输出端的转矩和转速,使用一台仪器就可以测量出系统效率。
4.驱动器输出测量
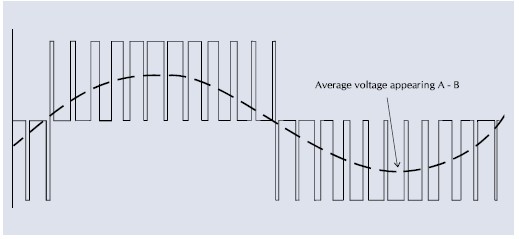
脉宽调制驱动器的输出波形非常复杂,由一系列高频分量(因载波)和低频分量(因基波)组合而成。
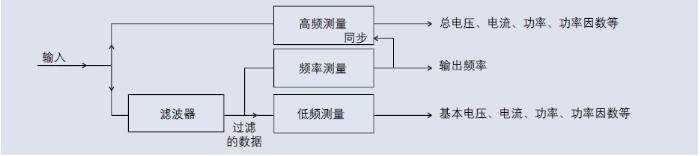
对大多数功率分析仪来说,这带来的问题是:如果在高频测量,那么波形中的低频信息将丢失;如果滤除脉宽调制波形在低频测量,那么高频数据将丢失。这个难题的出现是因为在低频对波形进行调制。因此,高频测量(如总电压有效值、总功率等)必须在高频处进行,但必须超出输出波形低频分量的整数倍。
泰克PA4000功率分析仪利用脉宽调制输出测量的特殊工作模式克服了这个难题。它对数据进行高速采样,并实时计算总体数量,包括所有谐波和载波分量。与此同时,对采样数据进行数字化滤波,提供低频测量,如输出频率的基波分量和测量。
除了从同一测量中获得低频和高频结构外,该技术允许高频测量与低频信号同步,这是提供精确和稳定的高频测量结果的唯一方法。
根据测量的输出频率范围,滤波器的选择方案有3种,参见表2。
滤波器的选择并不影响较高频率分量的测量,因为这些测量是通过未经过滤的数据进行的。不过,为了优化低频测量结果,您应当为应用选择正确的滤波器。
5.使用PA4000示波器测量驱动器输出
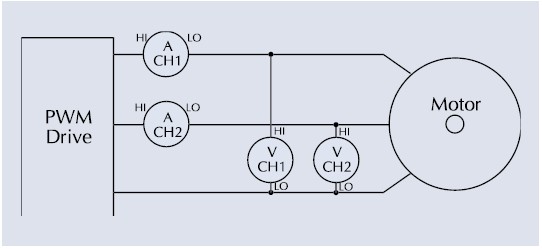
该仪器通过三相三线配置连接至输出。(又称作两表法。关于两表法的更多信息,请参见应用指南:三相测量原理。)对于输出电流高达30A的脉宽调制驱动器,PA4000可以通过其内部电流分流器,直接与驱动器输出相连,如图4所示。
对于输出电流超过30 A的脉宽调制驱动器,您可以使用外部电流传感器或外部电流分流器。泰克公司提供多种固定核心电流传感器,最高电流达1000 A。这些传感器包括电缆,实现与PA4000的快速连接,并利用仪器的15 V直流电源。当PA4000功率分析仪与外部分流器一起使用时,您可以将分流器与外部分流电压输入相连。这些输入可以测量从X V到Y V的分流输出。对于电流传感器和外部分流器,重要的是,记住正确设置缩放比例。
特别是对于低电流驱动器, 如果可能, 应当将PA4000直接与脉宽调制输出端相连。这是因为,尽管交流电流变压器和霍尔效应电流传感器在较高电流时提供良好的精度,但对于几安培的较低电流,其结果精度往往较差。
尽管在脉宽调制驱动器输出端出现极高的共模电压,为了从电流分流器得到优异的结果,PA4000输入电路已经优化。分流器两端电压可能只有几毫伏,但分流器电势相对于接地端上下波动幅度高达数百伏,每微秒高达数千伏。
虽然采用两表法时,PA4000只有两个通道用于测量,但该仪器将以矢量方式计算和显示第三条(非测量)线路的电流值。这将为权衡负载提供有价值的检查。此外,由于两表法不需要分析仪的第三个通道,它可以用作独立的测量通道,如测量脉宽调制驱动器内的直流总线,详见第7部分介绍。
一旦分析仪进行连接和配置完毕,它将利用选定的滤波器测量驱动器输出功率。如果PA4000测量频率有困难,应确保已经指定正确的滤波器频率范围。
注意,Vrms、Arms和功率数字是通过预过滤值测得的,因此包括所有的高频分量,其中基波值只考虑对马达有用功的贡献。电压有效值与基波电压存在显著差异是很正常的。通常,在电流和功率之间的差异较小,因为感应马达对电流进行了过滤。
通过SUM通道读取的总功率和基波功率之间的差异,可以估算高频损耗。这代表脉宽调制驱动器提供的电力,这部分电力对机械输出功率没有贡献,因此增加了马达的热量:
高频损耗=总功率-基波功率
当进行脉宽调制驱动器比较时,这是非常有意义的测量。
6.驱动器直流总线测量
虽然脉宽调制驱动器输入和输出之间的连接称为直流总线,但这个总线上的电压和电流远非纯直流,因此,在进行所需的测量时必须小心谨慎。
直流总线测量最好在存储电容器输入端进行,如图5所示,因为从本质上讲,这里的电流是来自交流电源的低频电容器充电脉冲,是从逆变器吸收的高频电流脉冲中释放出来的。
自电机工程诞生以来,三相交流马达一直是工业领域的主力。它们可靠、高效、费效比高,需要少量维修或根本不需要维修。此外,交流马达(如感应马达和磁阻马达)无需与转子的电气连接,因此很容易实现阻燃,用于危险环境(如矿山)。
为了提供适当的交流马达速度控制,必须为马达提供三相电源,其电压和频率可以变化。这种电源将在定子中形成一个变速旋转磁场,使得转子按照所需的速度旋转,且滑动很小,如图1所示。这个交流马达驱动器可以高效提供从零速到全速的全转矩,如果需要的话,还可以超速,而且通过改变相位旋转,可以很容易使马达双向运转。具有这些特点的驱动器称作脉宽调制马达驱动器。
交流马达驱动系统示意图
脉宽调制驱动器可以生成复杂波形,如在到马达的输出上,以及到驱动器的电源上。本博文将分两部分,探讨马达驱动器的电气测量话题。
2.对脉宽调制马达驱动器的测量
表1给出了脉宽调制马达驱动器的典型测量。
表1. 常见的脉宽调制马达驱动器测量
3.马达输出测量
图1说明,通过在马达输出轴安装转速和转矩传感器,可以对马达输出进行测量。
图1.马达输出测量
3.1转矩和转速传感器
转矩和转速传感器生成的电信号与转矩和转速成正比。通过测量这些信号,可以确定马达的转速和转矩,从这些测量结果中可以计算马达输出功率。
3.2转矩
马达转矩是在其输出轴上形成的旋转力,它是一个扭力,其单位是牛顿米(Nm)或英尺磅(1英尺磅=1.3558 Nm)。对于小型马达而言,其转矩额定值低于1 Nm;对于大型马达而言,其转矩额定值达到几千Nm。
通过旋转应变计以及利用固定接近、磁致伸缩和磁弹性传感器,可以测量转矩。这些传感器都是温度敏感型的。旋转传感器必须安装在转轴上,由于空间受限,这并非总能行得通。
为测量转矩,应变计往往直接安装在转轴上。由于转轴旋转,转矩传感器必须通过滑环、无线通信或电感耦合与外边世界耦合。
3.3转速
马达转速通常以每分钟转速(RPM)来描述,即它在1分钟内沿固定轴旋转的完整圈数。
转速传感器输出可能是一个与转速成正比的模拟电压。更普遍的是,转速传感器输出是一个由马达转轴上圆盘生成的TTL脉冲。通过测量TTL信号频率,并应用比例因数,可以确定马达转速。
例如,如果转盘每转一圈生成n个脉冲,那么每分钟转速(RPM)可以计算为:
3.4实现转矩和转速测量与电气测量相结合
为了确定马达和驱动器组合的效率,必须考虑系统的电气输入以及在马达输出端生成的机械功率。马达输出功率是转矩和转速的乘积:
马达输出功率(W)=转矩(Nm)× 转速(弧度/秒)
= 转矩(Nm)× 转速(RPM)×
注意:1ft-lb=1.3558Nm(牛顿米)
1HP=745.7W
通过以下公式,可以计算系统效率:
为了进行这些测量,PA4000包括传感器输入端,用于连接转矩和转速传感器。通过测量驱动器输入端消耗的电力、以及马达输出端的转矩和转速,使用一台仪器就可以测量出系统效率。
4.驱动器输出测量
脉宽调制驱动器的输出波形非常复杂,由一系列高频分量(因载波)和低频分量(因基波)组合而成。
对大多数功率分析仪来说,这带来的问题是:如果在高频测量,那么波形中的低频信息将丢失;如果滤除脉宽调制波形在低频测量,那么高频数据将丢失。这个难题的出现是因为在低频对波形进行调制。因此,高频测量(如总电压有效值、总功率等)必须在高频处进行,但必须超出输出波形低频分量的整数倍。
泰克PA4000功率分析仪利用脉宽调制输出测量的特殊工作模式克服了这个难题。它对数据进行高速采样,并实时计算总体数量,包括所有谐波和载波分量。与此同时,对采样数据进行数字化滤波,提供低频测量,如输出频率的基波分量和测量。
除了从同一测量中获得低频和高频结构外,该技术允许高频测量与低频信号同步,这是提供精确和稳定的高频测量结果的唯一方法。
根据测量的输出频率范围,滤波器的选择方案有3种,参见表2。

滤波器的选择并不影响较高频率分量的测量,因为这些测量是通过未经过滤的数据进行的。不过,为了优化低频测量结果,您应当为应用选择正确的滤波器。
5.使用PA4000示波器测量驱动器输出
该仪器通过三相三线配置连接至输出。(又称作两表法。关于两表法的更多信息,请参见应用指南:三相测量原理。)对于输出电流高达30A的脉宽调制驱动器,PA4000可以通过其内部电流分流器,直接与驱动器输出相连,如图4所示。
对于输出电流超过30 A的脉宽调制驱动器,您可以使用外部电流传感器或外部电流分流器。泰克公司提供多种固定核心电流传感器,最高电流达1000 A。这些传感器包括电缆,实现与PA4000的快速连接,并利用仪器的15 V直流电源。当PA4000功率分析仪与外部分流器一起使用时,您可以将分流器与外部分流电压输入相连。这些输入可以测量从X V到Y V的分流输出。对于电流传感器和外部分流器,重要的是,记住正确设置缩放比例。
特别是对于低电流驱动器, 如果可能, 应当将PA4000直接与脉宽调制输出端相连。这是因为,尽管交流电流变压器和霍尔效应电流传感器在较高电流时提供良好的精度,但对于几安培的较低电流,其结果精度往往较差。
尽管在脉宽调制驱动器输出端出现极高的共模电压,为了从电流分流器得到优异的结果,PA4000输入电路已经优化。分流器两端电压可能只有几毫伏,但分流器电势相对于接地端上下波动幅度高达数百伏,每微秒高达数千伏。
虽然采用两表法时,PA4000只有两个通道用于测量,但该仪器将以矢量方式计算和显示第三条(非测量)线路的电流值。这将为权衡负载提供有价值的检查。此外,由于两表法不需要分析仪的第三个通道,它可以用作独立的测量通道,如测量脉宽调制驱动器内的直流总线,详见第7部分介绍。
一旦分析仪进行连接和配置完毕,它将利用选定的滤波器测量驱动器输出功率。如果PA4000测量频率有困难,应确保已经指定正确的滤波器频率范围。
注意,Vrms、Arms和功率数字是通过预过滤值测得的,因此包括所有的高频分量,其中基波值只考虑对马达有用功的贡献。电压有效值与基波电压存在显著差异是很正常的。通常,在电流和功率之间的差异较小,因为感应马达对电流进行了过滤。
通过SUM通道读取的总功率和基波功率之间的差异,可以估算高频损耗。这代表脉宽调制驱动器提供的电力,这部分电力对机械输出功率没有贡献,因此增加了马达的热量:
高频损耗=总功率-基波功率
当进行脉宽调制驱动器比较时,这是非常有意义的测量。
6.驱动器直流总线测量
虽然脉宽调制驱动器输入和输出之间的连接称为直流总线,但这个总线上的电压和电流远非纯直流,因此,在进行所需的测量时必须小心谨慎。
直流总线测量最好在存储电容器输入端进行,如图5所示,因为从本质上讲,这里的电流是来自交流电源的低频电容器充电脉冲,是从逆变器吸收的高频电流脉冲中释放出来的。
脉宽调制PWM马达驱动 相关文章:
- 脉宽调制(PWM) 马达驱动器电源的测试分析(下)(01-12)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)