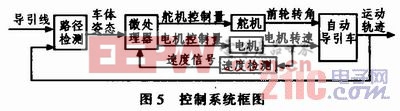
智能车电磁检测及控制算法的研究
对舵机的控制,要保证在任何情况下,总能给舵机一个合适的偏移量,保证小车能始终连贯地沿导引线行驶,防止出现大的抖动。
舵机转向是一个双输入单输出的控制器:输入量为偏移角度α及偏离距离d,输出量为舵机的给定值。通过实验得出,系统可以依靠单个输入量来完成控制的舵机,譬如以偏移角度α作为输入,不考虑偏离距离d的作用。这种情况下系统虽然能够运行,但是控制的精度及响应速度较低。同样,在仅依靠偏离距离d的时候,系统的稳定性较差,会出现比较明显的抖动。因此,需要综合分析这两个输入量之间的耦合关系,实现更为精确的控制。
3.1 基于模糊控制的变参数PD控制器
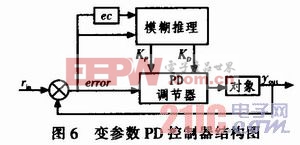
基于模糊控制的PID参数整定就是将模糊理论应用到PID 3个参数的整定中,将模糊理论与PID控制结合起来,构成一个模糊PID控制器。本设计去掉了PID中的积分环节,采用基于模糊控制的变参数PD控制器。因积分环节主要是用于消除静态误差,相对于干扰较大舵机控制来说,它的作用并不明显,反而会降低响应速度。变参数PD控制器的结构如图6所示。图中:rin为系统的输入;yout为系统的输出;error为系统输入与输出的差;ec为误差的变化率。
为了实现变参数PD控制,算法引入了两个新的变量:偏移角度的变化率△α和偏移距离的变化率△d。
3.2 模糊控制规则及参数的整定
在模糊控制中取误差α(或d)和误差变化率△α(或△d)为输入语言变量,以构成一个二维模糊控制器,每个语言变量取负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)七个语言值。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,建立转向模糊规则表。
参数的调整就是寻求Kp、KD与△α、△d之间的关系。智能车在运行中不断检测α、d和△α、△d,然后查询模糊规则表选择合适的Kp、KD参数进行控制。实际控制中,当△α,△d增大时,表明车体有偏离导线的趋向,这时候增加Kp、KD,阻止车体的继续偏离;当△α,△d减小时,表明车体正逐渐趋近于导线,这时候就要减小Kp、KD。
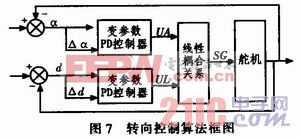
设计中,系统首先采用基于模糊控制的变参数PD控制器分别实现单个输入量下的控制量输出,然后实验得出的线性耦合关系将两个输出量耦合为一个量控制舵机。
图7所示为转向控制算法框图。UA为纯偏移角度控制时舵机的给定量,UL为纯偏离距离控制时舵机的给定量,SG为最终的舵机给定量。通过实验得到的耦合关系为:SG=0.6UA+0.4UL。这时的舵机响应速度快,直道的跟踪效果很好,通过弯道时可以看到比较明显的内切。
智能车要完成起动、加速、减速、制动等动作。直线行走、拐弯和停车时要求不同的车速,因此速度必须采用闭环控制。智能车的速度与转向是两个独立的被控量,但它们都是根据偏移角度α及偏离距离d来确定输出给定量的。
根据智能车速度控制的特点,设计采用了变结构控制方法。变结构系统是指在控制过程(活瞬态过程)中,系统结构(或叫模型)可发生变化的系统。变结构控制对加给系统的摄动和干扰有良好的白适应性。对于车速的控制,当偏差较小时,采用PID控制,提高稳态精度;当偏差较大时,采用PD控制,以便加快响应速度;当偏差大于可调节范围时,采用Bang-Bang控制。图8所示为速度控制算法框图。
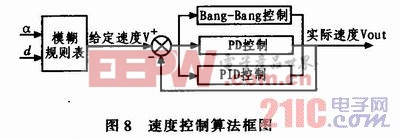
不同的偏移角α及偏离距离d通过查询速度模糊规则表得到给定速度等级V。系统实时检测电机的实际速度值,同当前的设定值做比较,根据误差范围的不同分别采用PID控制、PD控制和Bang-Bang控制。当速度误差在±5%时采用PID控制;当速度误差在±5%~±10%时采用PD控制;当速度误差大于±10%时采用Bang-Bang控制。
5 结论
基于电磁传感器的智能车的设计,可以检测出车模相对于导线的偏移角度α及偏离距离d,并以此作为控制的输入量。通过变参数的PD控制和变结构控制分别实现舵机和电机的精确控制。整体调试后车模速度由传统控制方法下的1.8 m/s提高到目前的2.3 m/s,转弯处可以看到比较明显的内切。实验结果表明,这种控制方法相对于单一的PID控制具有响应时间快,稳态性能好,抗干扰能力强的特点。
- 如何用频率计算法设计RCC式开关电源?(12-08)
- 导入高效能控制演算法,提升MI无线充电传输功率(12-08)
- 马达控制三相变频器中相电流Shunt 检测电路设计(06-26)
- 基于MPSK信号的SNR估计算法的研究(01-08)
- 改进型PID神经元控制算法在APF控制中的应用(01-06)
- 变压器之遗传算法(Genetic Algorithm)的具体实现过程(12-18)