智能车电磁检测及控制算法的研究
摘要:在智能车传统PID、PD控制的基础上进行改进,提出了一种更为稳定快速的循迹控制方法。智能车的方向控制和速度控制都具有非线性、大滞后的特点,传统的控制方法存在着响应时间不够及稳态误差大的缺点。通过电磁传感器的合理设计,对路径信息和车体状态进行检测,并在此基础上引入基于模糊控制的变参数PD控制和变结构控制。实验结果表明,与传统方法相比,智能车运行的稳定性和快速性都得到了很大的提高。
关键词:智能车;MC9S12XS128;模糊控制;变参数PD控制器;变结构控制器
本文是以第五届“飞思卡尔”杯全国大学生智能汽车竞赛为背景。本届比赛新增加了电磁组的比赛,在50 cm宽的赛道中心铺设有直径0.1~0.3 mm的导线,其中通有20 kHz,100 mA的交变电流。除此之外,在赛道的起跑线处还有永磁铁标志起跑线的位置。车模要通过自动识别导线所产生的电磁场进行路径检测。
从道路元素来看,赛道一般可以分成直道、转弯、S道、回环道等形式。在智能车行驶的过程中,为了选择最佳路径,减少行驶距离,在转弯处最好选择内切,小S弯甚至可以近似的走成直线。但是由于电磁传感器的局限性,不可能像摄像头一样检测到前方赛道的全貌,这就要求在算法上有所突破。
1 智能车系统的硬件组成
1.1 整体硬件结构介绍
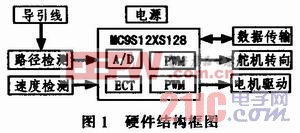
图1所示为智能车控制系统的硬件框图。系统采用飞思卡尔半导体公司的16位微处理器MC9S12XS128作为核心控制芯片,设计最小系统模块;外围电路包括路径检测模块,速度检测模块,舵机转向模块,电机驱动模块;电源模块为整个系统提供动力支持。其中速度检测模块采用光电编码器采集信号,并通过微控制器的ECT模块进行脉冲捕捉计数,测得速度值;电机驱动采用H桥,可实现电机的正反转及制动。
1.2 电磁传感器的设计
根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。本智能车选用工字型10 mH电感作为磁场感应传感器。这类电感体积小,Q值高,具有开放的磁芯,可以灵敏的感应周围交变的磁场,产生响应感应电动势。图2所示为路径检测模块电路图,这里只为其中的一路。
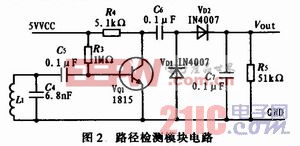
电路中L1为10 mH电感;C4为6.8 nF的谐振电容,实现20 kHz信号的选频电路;Vout为感应电动势输出端。传感器模块伸出车体约10 cm,距离地面8 cm。
由毕奥-萨伐尔定律知,通有稳恒电流的直导线周围会产生磁场,感应磁场分布是以导线为轴的一系列同心圆。圆上磁场强度大小相同,并随着距离导线的径增加成反比下降。
通电导线周围的磁场是一个矢量场。在本设计中,根据法拉第电磁感应定律,感应电动势可近似为: 。k为比例系数,与线圈摆放方法、线圈面积和一些物理常量有关。感应电动势的方向可用楞次定律来确定。对于放置在导线上方h处,与导线水平距离为x的线圈中产生的感应电动势的大小与
。k为比例系数,与线圈摆放方法、线圈面积和一些物理常量有关。感应电动势的方向可用楞次定律来确定。对于放置在导线上方h处,与导线水平距离为x的线圈中产生的感应电动势的大小与 成正比。θ是传感器所在平面与导线的夹角。
成正比。θ是传感器所在平面与导线的夹角。
图3所示为车模与赛道位置示意图,车体前部即为路径检测模块。α为车体相对于导线的偏移角度,d为车体相对于导线的偏离距离(垂直与车体中心线的横向距离)。在车模行驶的过程中,每个电感线圈距离导线的距离不同,夹角也不同,因此输出的感应电动势大小不同。
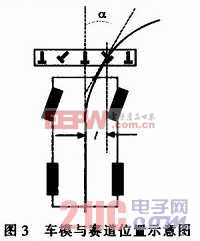
图4所示为本设计中电磁传感器的布局。每两个轴线相互垂直的电感作为一组传感器,水平放置。

设每组传感器中,前端电感输出的感应电动势为Ey,后端电感输出的感应电动势为Ex,则:
1)对于1号位的两个电感,计算 ,可求得电感所处磁场的导线方向,即车体相对于导线的偏移角度α;
,可求得电感所处磁场的导线方向,即车体相对于导线的偏移角度α;
2)2,3号位的电感同车体中心线成45°夹角,用来确定α值的正负,即导线所处的象限。当2号位检测到的磁场强度明显大于3号位时,以2号位前后两个电感的电动势之比 作为方向的参考:当
作为方向的参考:当 时,α为负(导线处于第二,四象限),
时,α为负(导线处于第二,四象限), 时,α为正(导线处于第一,三象限);3号位的判别方法与之相反。
时,α为正(导线处于第一,三象限);3号位的判别方法与之相反。
3)计算1号位前后两个电感感应电动势平方和之根 ,再乘以比例系数λ,得到
,再乘以比例系数λ,得到 ,即为车体偏离导线的距离。
,即为车体偏离导线的距离。
4)4,5号位的电感用来辅助判断d值的正负(左为负,右为正),方法同导线方向的判别类似。
由于实际赛道中磁导线的电流在50~100 mA之间,因此每次上电智能车都要有一个15 s的自学习的过程:将车体贴近赛道做左右摆动(不超出赛道范围),检测出不同的车体姿态下电感感应电动势的极值,并由此确定值。实验测得传感器模块距离的检测精度为1.5 cm,角度的检测误差在±5°范围内,前瞻距离可达到25 cm。实验的结果表明,这样的传感器布局对于导线的检测是比较准确的,而且它可以预测出导线的方向趋势,便于前瞻性控制算法的设计。
2 整体控制系统的设计
智能车的控制结构是以微处理器为核心。电机控制量、电机转速和速度检测构成一个闭环,该闭环的输入为路径检测后微处理器给定的速度值,输出控制后轮驱动;舵机控制量构成一个控制系统通道,其输入为徽处理器给定的转角值,输出控制前轮转向:最后以运动轨迹作为路径检测反馈控制器的输入,其与导线比较确定车体姿态从而构成一个大的闭环控制系统。智能车的控制系统框图如图5所示。
- 如何用频率计算法设计RCC式开关电源?(12-08)
- 导入高效能控制演算法,提升MI无线充电传输功率(12-08)
- 马达控制三相变频器中相电流Shunt 检测电路设计(06-26)
- 基于MPSK信号的SNR估计算法的研究(01-08)
- 改进型PID神经元控制算法在APF控制中的应用(01-06)
- 变压器之遗传算法(Genetic Algorithm)的具体实现过程(12-18)