基于单片机的铅酸蓄电池智能充电器设计
引言
蓄电池是广泛应用于国防、交通运输、通讯、电力等国民经济各个部门的重要能源装置,是社会生产经营活动中不可缺少的产品。蓄电池的使用寿命是专业人员及使用人员普遍关注的问题,其由多方面因素决定,其中最重要的是蓄电池本身的物理性能。除此之外, 电池的管理技术、不合理的充放电模式是造成电池寿命缩短的主要原因。
如何高效、快速、无损地对蓄电池进行科学充电,一直是蓄电池界关心的问题,也是蓄电池使用和保养中非常重要的内容。因此,研究先进的充电技术及充电装置是蓄电池领域重要的课题,它是涉及电力电子、自动测量与自动控制等技术的高端课题。
1 智能充电器硬件部分
充电装置硬件总体结构设计框图如图1所示,由主电路和控制电路两部分组成。虚线框外部分为主电路,虚线框内部分为控制电路。主电路的功能是将输入的三相交流电转变成蓄电池负载需要的直流电;控制电路用于实现电源各种功能。
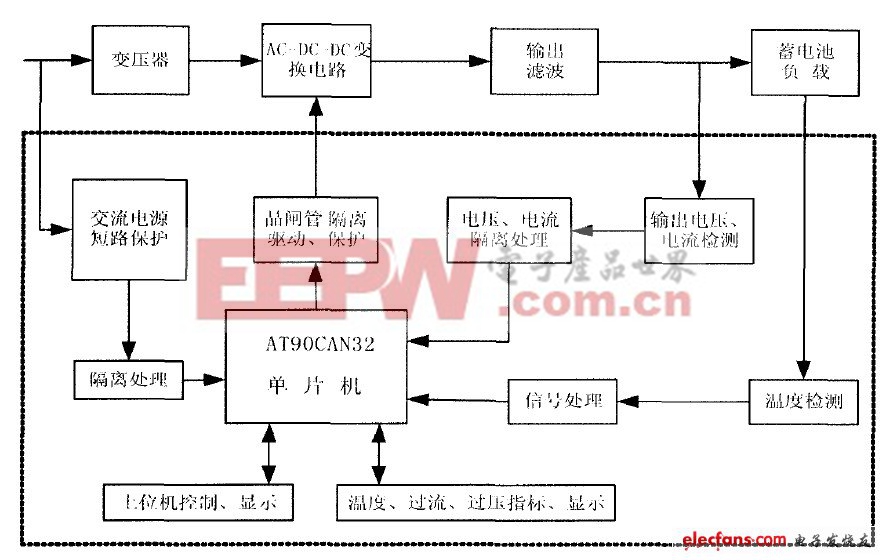
图1 系统原理框图
1)充电主电路
主电路采用的是AC-DC-DC变换电路,AC-DC部分的作用是通过整流变压器将三相交流电源U、V、w进行降压、隔离,经六个二极管所组成的三相不控桥整流后得到不可控制的直流电压U1,如图2所示。也就是说,对输入为AC380V的三相电压,U1的大小仅与整流变压器的变比有关,一旦电网电压和变压器的变比确定,U1也就恒定不变。
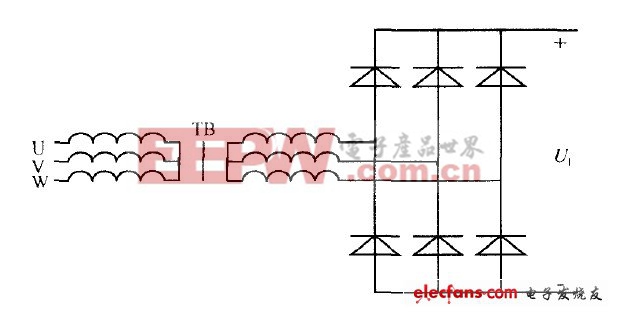
图2 三相降压整流电路
DC-DC部分采用Buck电路,如图3所示。当对蓄电池进行充电时,全控器件VT2关断,直流电压U1经过全控开关器件VT1、续流二极管VD2和电感L(同时兼作滤波)组成的Buck电路,并通过控制VT 通断来控制输出电压U2的大小,从而控制蓄电池的充电电流和充电电压。
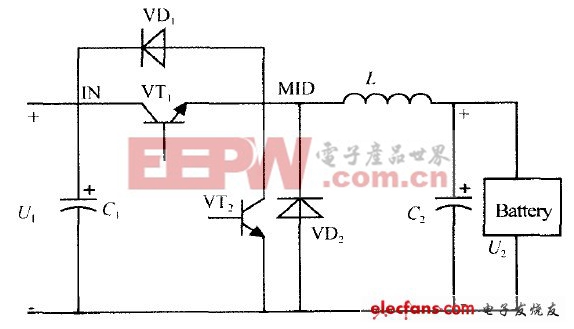
图3 Buck-Boost电路2)主电路保护电路
(1)过电流保护。
二极管、晶闸管的热容量小,对5倍以上的过载要求在0.02秒内切断,否则元器件就会损坏,因此必须用快速熔断器。
(2)过电压保护。
晶闸管与整流二极管承受过电压的能力有限, 即使电压超过元件反向电压击穿电压数值不多, 时间不长(0.5~1us),都有可能使元件反向击穿,造成损坏。过压保护措施是接人阻容吸收回路,把它并接在交流侧、直流侧, 或与整流元件并联,降低阻容电路两端的电压变化率,从而起过压保护作用。
3)控制电路。
控制电路包括电压反馈电路和电流反馈电路、PI调节器及反馈选择电路、D/A转换电路,CAN总线电路,单片机及其外围电路。其各模块框图如图4所示。

图4 控制电路原理框图
2 软件设计
软件设计总体框图如图5所示,其具体流程如下:首先调用初始化函数对所有设备进行初始化。之后判断关机是否正常,如果上次关机为正常关机则调用各种模式选择函数,选择充电模式;如果不正常,则读EEPROM,读取非正常关机时充电机的状态。然后进入循环,在5分钟之内,允许对充电机自动充电状态下的给定电压进行设定;每1O分钟,将充电机当前状态记人EEPROM.选择充电方式,用相应的子程序对数据进行处理,得出输出结果,并通过DA变换为所需的电压信号;每秒钟调用一次计时函数,记录并显示当时的充电总时间和所处阶段的充电时间;判断是否满足阶段转换的条件,控制阶段转换灯;根据关机条件判断充电是否完成。
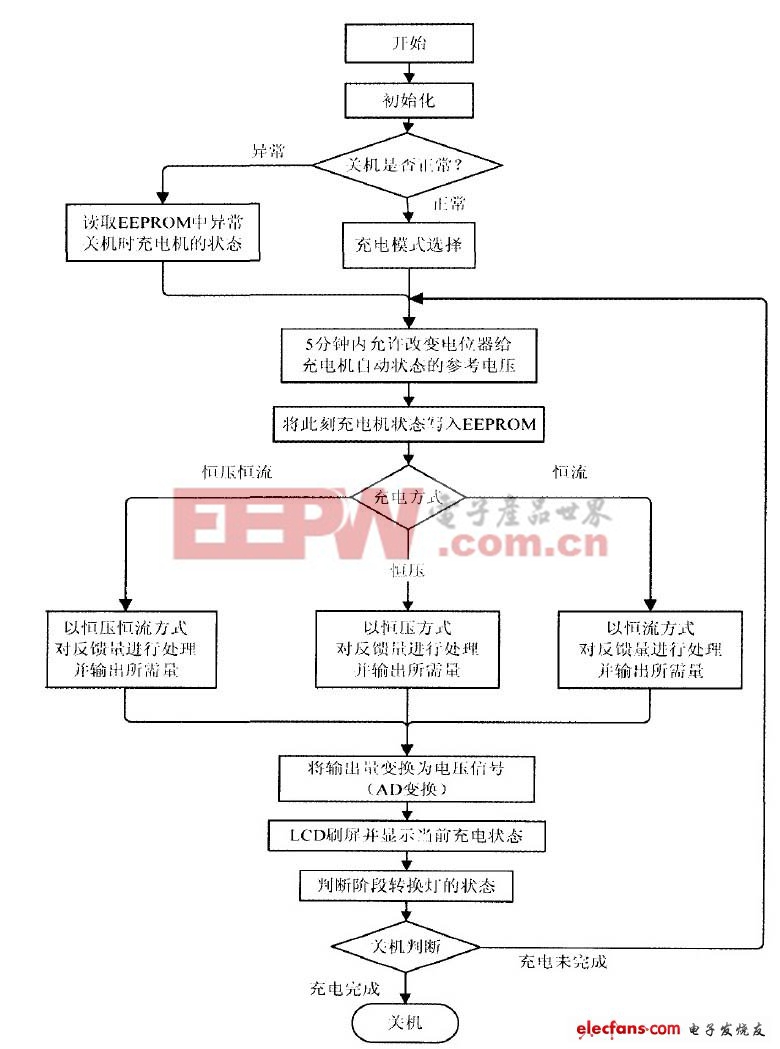
图5 主函数流程图
图5中,恒压恒流方式包括三种充电方式:①开始阶段恒电流的修正恒压充电,②最后阶段恒电流的修正恒压充电,③开始阶段和最后阶段恒电流的修正恒压充电。实际应用中可以根据需要和充电效果在程序中进行调整。
3 实验分析
本智能充电机分手动模式和自动模式两种充电方式。下面分别对其进行验证。
手动模式充电波形如图6所示,图中第一通道为电池端电压;第二通道为脉冲变压器原边的驱动信号;第三通道为模拟PI调节器的给定参考电压;第四通道为电流钳测得的实际充电电流信号。
可以看出,手动模式下,单片机能够正常地从电位器取出信号,并将其转换为相应的电压信号发送给模拟PI调节器作参考。电池端电压随充电电流波动,因此能够进行正常的手动充电。
手动模式充电波形如图7所示,充电机在电池单格大于等于2.35V时进行阶段转换,每次转换过后都将充电电流减小为上阶段充电电流的一半。
程序中设置进行三次阶段转换,第三阶段进行过充电。
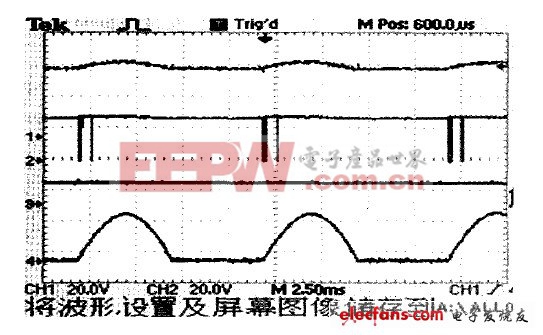
图6 手动模式充电波形
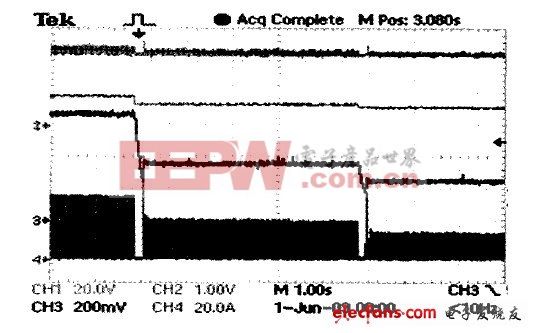
图7 自动模式充电波形
第一通道为电池端电压,第二通道为电流反馈电路经第一级放大电路之后的信号,第三通道为模拟PI调节器的给定参考电压,第四通道为电流钳测得的实际充电电流信号。从图中可以看出充电机可以正常完成三阶段恒电流充电。
4 结束语
以单片机AT90CAN32为核心的智能充电设备控制系统的硬件设计方案
- 微距离无线充电器的设计方案(07-25)
- 无线充电技术介绍之二(03-04)
- 基于FPGA的WPC标准无线充电器接收器解决方案(02-11)
- 无线充电技术介绍系列之一(03-04)
- 氮化镓(GaN)技术将带给我们怎样未来?(03-10)
- 无线充电:在哪里和怎么充电?(11-19)