电流控制技术和斜坡补偿
输入端的波形坡度不合适,功率开关控制电路就会发生次谐波振荡。峰值电流控制通过外加斜坡补偿来防止这种振荡;平均电流控制是由晶振幅度来提供足够的补偿坡度的。
所以,用平均电流模式解决次谐波问题更为合适。在平均电流模式中为了抑制次谐波和限定开关频率附近电流放大器增益,在电路设计中必须遵循的一条标准是:接到PWM比较器的一个输入端的电感电流下降沿不能大于接到PWM 比较器的另一个输入端的晶振幅值坡度。这也间接设定了最大电流环路增益的交越频率。
三、斜坡补偿的引入
斜坡补偿原理:
鉴于以下原因,峰值电流控制必须考虑采用斜坡补偿。
1 电路的稳定性
图 2、图3 分别是占空比大于50%和小于50%的尖峰电流控制的电感电流波形图。其中Ve 是电压放大器输出的电流设定值,?Io 是扰动电流,m1、m2 分别是电感电流的上升沿及下降沿斜率。由图可知,当占空比小于50%时扰动电流引起的电流误差?I1 变小了,而占空比大于50%时扰动电流引起的电流误差? I1 变大了。所以尖峰电流模式控制在占空比大于50%时,经过一个周期会将扰动信号扩大,从而造成工作不稳定,这时需给PWM比较器加坡度补偿以稳定电路,如图4 所示。加了坡度补偿,即使占空比小于50%,电路性能也能得到改善。

图 2 占空比小于50%
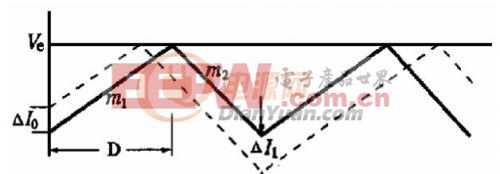
图 3 占空比大于50%
讲沿的斜率2 m ,这样扰动信号在一个周期内就完成了校正,如图5 所示。
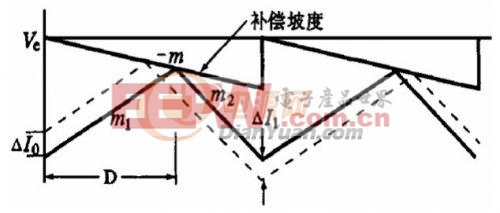
图 4 占空比大于50% 带坡度补偿

图5 m=m2 时,电感电流波形
2.减小尖峰值/平均值误差
电流模式控制的实质是使平均电感电流跟随误差电压 Ve 设定的值,即可用一个恒流源来代替电感,使整个系统由二阶降为一阶。但如图6 所示,尖峰电流控制模式中随着占空比D1、D2 的不同,电感电流的平均值I1、I2 亦不同。如图7 示,可以通过斜坡补偿来获得不同占空比下一致的电感电流。
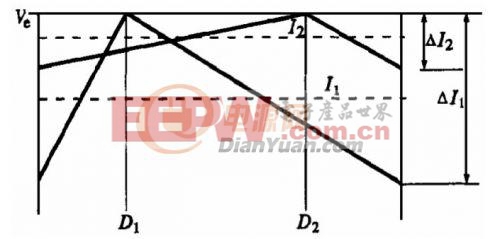
图 6 尖峰电流控制模式中不带斜坡补偿的平均电流和尖峰电流波形图
另外图7 所示的电感电流平均值和峰值间也存在差值,在BUCK电路中由于电感电流的纹波相对电感电流的平均值很小,并且存在电压外环的校正作用,所以峰值和平均值的这种误差可以忽略;在BOOST电路中,峰值要跟随输入电网的正弦波,所以和平均值间的误差很大。这种误差最大,需要一个大电感来使电感电流的纹波变小,减小抗干扰能力。这也是在BOOST中采用平均值电流模式的原因。
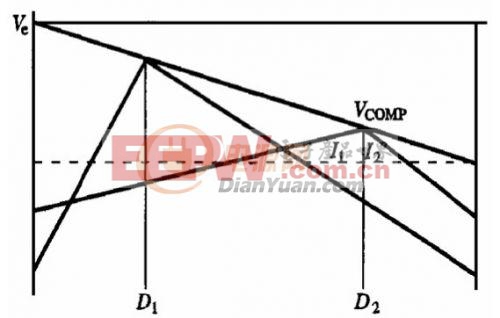
图 7 尖峰电流控制模式中带斜坡补偿的平均电流和尖峰电流波形图
3.抑制次谐波振荡
内部电流环的增益尖峰是电流模式控制的一个重要问题。这种增益尖峰发生在二分之一开关频率处,使相移超出范围,导致不稳定,并使电压环进入次谐波振荡。这时在连续固定的驱动脉冲下,输出占空比却在变化,如图8 所示。采用斜坡被偿也能很好地抑制次谐波振荡。
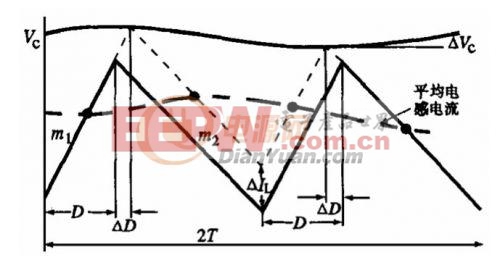
图8 次谐波振荡时的电感电流波形
4.振铃电感电流
① 电感电流对电源或负载的瞬态变化产生振铃响应;
② 在开关频率附近控制环路增益达到最高,从而产生不稳定趋向。
通过斜坡补偿可以抑制这种振铃电感电流,例如当补偿坡度为电感电流下降沿的斜率时(即m=-m2),振铃电流在一个周期内就完全得到了抑制。
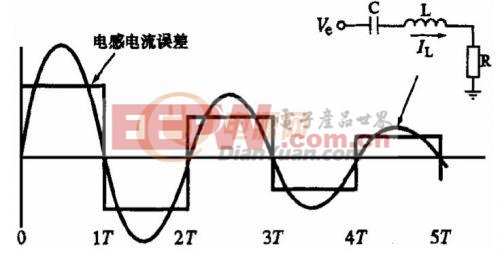
图 9 等效电感电流、电流误差和周期T 的关系曲线
斜坡补偿设计步骤:
图 10 示出斜坡补偿电路。R1 和R2 组成了从晶振的输出到限流引脚(脚1)的分压网络,迭加斜坡补偿信号到初级的电流波形,R1、R2 值的比例决定了所加的斜坡补偿量。电容C1是交流耦合电容,使晶振的交流分量耦合到R2,去掉了直流偏置部分。C2 和R1 组成滤波电路,滤去初级Ip中的前沿尖峰,避免误动作。? VOSC是晶振锯齿波的峰峰值。将电容去掉得到图11 简化电路。
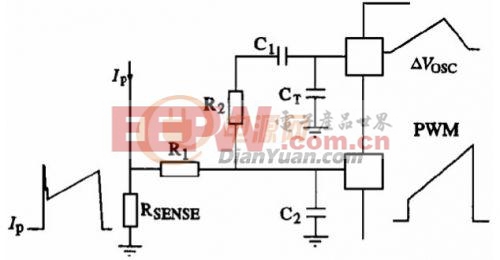
图10 斜坡补偿电路
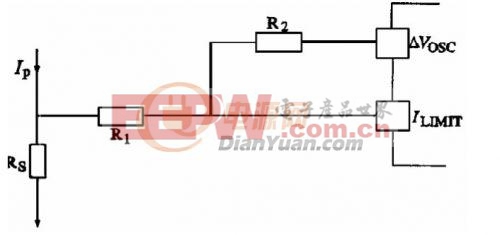
图 11 简化的斜坡补偿电路
四、电流控制技术及斜坡补偿的应用
1. 平均电流法Boost电路设计实例
设计 1200W功率因数校正电路,采用Boost电路的拓扑,平均电流法的控制电路,UC3854BN的控制芯片。
电路参数如下:
输入电压:Vin=220V±25%(165V~275V);
直流输出电压:Vo=410V;
开关频率:fs=80kHz;
功率因数:PF>0.993;
效率:?>0.95;
电感:L=600μH;
检测变压器变比:1∶100;
检测电阻:15O。
①电流环设计为了稳定运行,须进行电流环相位补偿。
电流环补偿后在开关频率附近提供平稳增益。在低频的零点响应提供高增益完成平均电流控制工作。在开关频率附近误差放大器的增益要配合电感电流的下降沿。本设计开关频率为80KHz,单位增益交越频率应为14KHz(1/6 开关频率),但本电流环的主要工作是跟踪线电流,故10KHz 的带宽是合适的值。电流环的零点必须设置在交越频率上,或低于交越频率处。如设置在交越
- 基于BOOST型DC/DC转换器的斜坡补偿电路(12-09)
- 一种带有曲率补偿的宽输入带隙基准源设计(12-09)
- 一位工程师对环路补偿的计算和仿真分享心得经验(12-09)
- 20 MJ补偿脉冲发电机的应用设计(12-08)
- 串-并联补偿式UPS 串联变换器研究(12-08)
- TPS65142环路补偿设计考虑因素之讨论(12-08)