单片机产生SPWM波在UPS电源中的应用
时间:03-05
来源:互联网
点击:

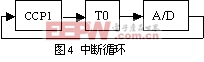
中断,A/D转换完成产生中断,处理转换值,中断周期为20us。在程序开始运行后,首先发生CCP1中断,使单片机按正弦表的第一个脉宽值输出SPWM波,153us后,产生T0中断,进行A/D转换,并将T0中断周期改306us。 20us后转换完成,产生A/D中断。然后又是CCP1中断,读取A/D转换值和正弦表来调整脉宽。这样周而复始,产生连续不断的SPWM控制信号。中断循环结构如图4所示。
4 实验结果及波形
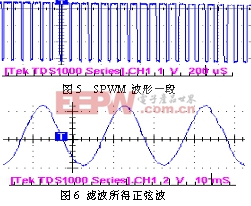
由单片机CCP2口输出的SPWM波形如图5所示,由于频率为20KHZ,脉宽很窄,只截取了其中的一段,看不到脉宽从最小变到最大的过程,但可以看出这段波形中脉宽逐渐变窄,符合SPWM的变化规律。
经RC滤波后得到如图6所示的正弦波,频率为49.6HZ,与设计的50HZ基本吻合,波形平滑无畸变,满足设计要求。
本UPS系统中,采用的是全桥逆变电路,控制方式是一个桥臂上的两个IGBT互补导通,另一桥臂的两个一个常开,一个常闭。负半波时,换到另一桥臂的两个IGBT互补导通,原桥臂变为一个常开,一个常闭。因此需要将单片机产生的一路SPWM信号变换成四路,分别驱动四个IGBT。具体实现电路如图7所示。
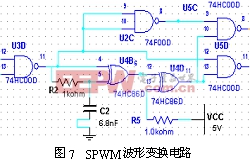
单片机输出的SPWM信号和正负半波信号分别加到U3D的12和13脚,此图只画出了同一个桥臂的两个IGBT的驱动波形产生电路,另一桥臂的产生电路与此电路完全相同,只是在输入的正负半波信号前加了一个反相电路,使得不论是正半波还是负半波,桥臂1和桥臂2的U3D的11脚总是一个为SPWM信号,另一个为低电平。经过后面的电路变换后,为SPWM信号的桥臂得到两路互补输出的SPWM波形,为低电平的桥臂则得到一个持续的高电平和一个持续的低电平,从而实现逆变全桥的驱动。
由于同一桥臂的两个IGBT互补导通,死区时间的设置是必不可少的,否则可能出现桥臂直通现象,导致器件甚至整个电损坏。图7中的R2、C2就是用来设定死区时间的,通过RC电路的冲放电得到
一个时间的延迟,再经过门电路的处理加到SPWM信号波形中。通过改变R、C的大小就可以调整死区时间的长短,本电路中电阻取1000欧姆,电容取6.8nF,得到5us的死区时间。
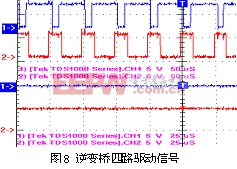
通过电路变换最后得到的逆变桥的四路驱动波形如图8所示。IGBT驱动采用低电平有效,由图可以看出,在同一桥臂上下两个IGBT驱动波形中,从一个驱动波形的低电平变到另一个驱动波形低电平时,有一段两个信号都为高电平的时间,也就是两个IGBT都不通的死区时间,防止了逆变桥的直通。
5 结 语
本文介绍的这种运用PIC单片机产生SPWM信号控制逆变桥的方法在UPS电源的应用中取得了较好的实验效果。同时,这种产生SPWM波的方法也可以用在其他正弦波逆变电源中。
参考文献
《Uninterruptible Power Supply Reference Design》1997 Microchip Technology Inc.
何应龙 李雪银《PIC16C7X入门与应用范例》 清华大学出版社. 2002
谭政华等《智能化逆变电源研制及其SPWM波软件生成》上海交通大学学报 2000年2月 第34卷第2期
- 逆变电源的SPWM波形发生电路(12-08)
- 基于DSP的三相SPWM逆变电源的设计(12-07)
- 单相正弦波逆变电源(11-27)
- 三相SPWM波形发生器的设计与仿真(05-14)
- 三相SPWM逆变器的调制建模和仿真(02-09)
- 专家解析:SPWM工作原理透彻分析(12-30)