三相SPWM逆变器的调制建模和仿真
随着电力电子技术的发展,SPWM正弦脉宽调制法正逐渐被人们熟悉,这项技术的特点是通用性强,原理简单。具有开关频率固定,控制和调节性能好,能消除谐波,设计简单,是一种比较好的波形改善法。它的出现为中小型逆变器的发展起了重要的推动作用。由于大功率电力电子装置的结构复杂,若直接对装置进行实验,且代价高费时费力,故在研制过程中需要借助计算机仿真技术,对装置的运行机理与特性,控制方法的有效性进行试验,以预测并解决问题,缩短研制时间。MATLAB软件具有强大的数值计算功能,方便直观的Simulink建模环境,使复杂电力电子装置的建模与仿真成为可能。本文利用MATLAB/Simulink为SPWM逆变电路建立系统仿真模型,并对其输出特性进行仿真分析。SPWM技术成为目前应用最为广泛的逆变用PWM技术。因此,研究SPWM逆变器的基本工作原理和作用特性意义十分重大。
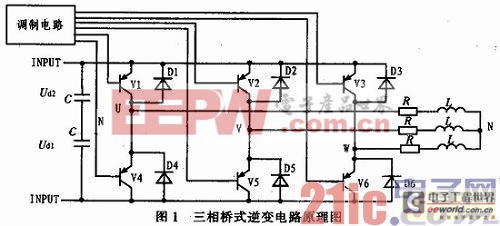
1 三相电压型桥式逆变电路
三相电压型桥式逆变电路如图1所示,电压型三相桥式逆变电路的基本工作方式也是180°导电方式,即每个桥臂的导电角度为180°,同一相上下2个桥臂交替导电,各相开始导电的角度依次相差120°。这样,在任一瞬间,将有3个桥臂同时导通。可能是上面一个臂下面2个臂,也可能是上面两个臂下面一个臂同时导通。因为每次换流都是在同一相上下两个桥臂之间进行的,因此也被称为纵向换流。当urU>uc时,给上桥V1臂以导通信号,给下桥臂V4以关断信号,则U相相对于电源假想中点N’的输出电压uUN'=Ud/2。当urUuc时,给V4导通,给V1关断,则uUN'=Ud/2。V1和V4的驱动信号始终是互补的。当给V1(V4)加导通信号时,可能是V1(V4)导通,也可能是二极管VD1(VD4)续流导通。
2 SPWM逆变器的工作原理
PWM的全称是Pulse Width Modulation(脉冲宽度调制),它是通过改变方波的占空比来改变等效的输出电压。所谓的SPWM,他是根据面积等效原理,PWM波形和正弦波是等效的,对于正弦波的负半周,也可以用同样的方法得到PWM波形。像这种脉冲的宽度按正弦规律变化而和正弦波等效的PWM波形,也称SPWM波形。就是在PWM的基础上改变了调制脉冲方式,脉冲宽度时间占空比按正弦规律排列,这样的输出波形经过适当的滤波就可以得到正弦波输出。它广泛的应用于直流交流逆变器等。
SPWM法是一种比较成熟的,目前使用较广泛的PWM法,SPWM法就是用脉冲宽度按正弦规律变化和正弦波等效的PWM波形即SPWM波形控制逆变电路中开关器件的通断,使其输出的脉冲电压面积与所希望输出的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出的电压和幅值。
要准确的生成SPWM波形,就要精确的计算出这两个点的时间。开关元件导通时间是脉冲宽度,关段时间是脉冲间隙。正弦波的频率和幅值不同时,这些时间也不同,但对计算机来说,时间定时器来实现。调制方法可以自己选择。
3 三相电压源SPWM逆变器的建模与仿真
3.1 三相电压源SPWM逆变器的MATLAB/Simulink建模
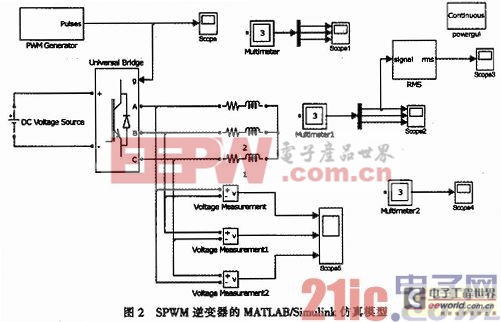
SPWM逆变器EDMATLAB/Simulink仿真模型如图2所示。
3.2 其他参数设置
逆变器的仿真建模如图2所示,有效值测量模块RMS设置其参数Fundamental frequency(Hz)为50 Hz,电压设置为220 V,阻感性负载R=3,L=0.01三负载设置相同。
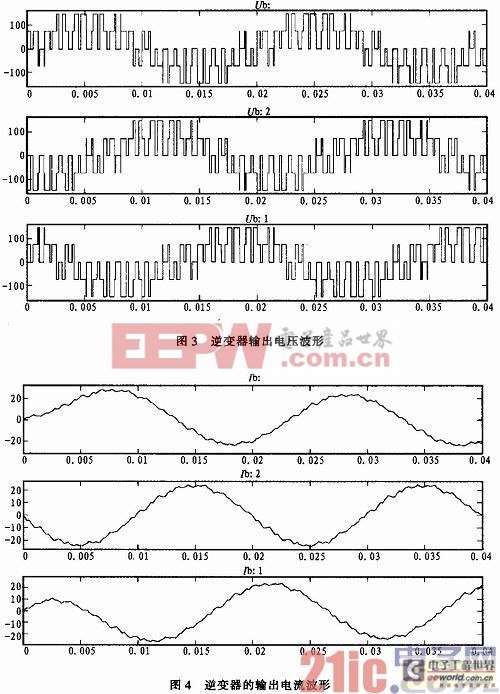
4 仿真结果
下面是输出交流频率为f=50 Hz,调制度为m=0.7时的曲线,逆变器电压和电流输出波形如图3和图4所示,A相阻感性负载的电流有效值如图5所示。

5 结论
通过上述采用Matlab/Simulink对三相SPWM逆变器进行建模和仿真的过程证明了Matlab/Simulink有良好的用户界面和模型结构,尤其是Power System Broswer为电气系统仿真省去了复杂的过程。它提供了极为有用的电力电子器件模块,用户不需要自己编程且不需推导系统的动态数学模型,建模过程更接近实际电路设计过程,且使用简便,也对三相SPWM逆变器有了进一步的理解。
在使用Matlab的Simulink进行仿真时,很多时候波形不能够快速正确的出现,这时就需要研究其深层次的原理,同时要注意Matlab的仿真的一些细节。通过适当的参数设置,选择能够满足的控制方式,运用SPWM控制技术,可以有效减小输出电压和输出电流的谐波分量,改善输出波形。
- 逆变电源的SPWM波形发生电路(12-08)
- 基于DSP的三相SPWM逆变电源的设计(12-07)
- 单相正弦波逆变电源(11-27)
- 三相SPWM波形发生器的设计与仿真(05-14)
- 专家解析:SPWM工作原理透彻分析(12-30)
- 正弦波逆变器SPWM设计参考(12-14)