基于前馈混合控制的BOOST型PFC控制器
时间:03-11
来源:互联网
点击:
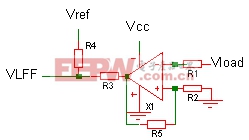
在控制系统中,忽略输出电容C的充放电电流时,i2只与负载吸收的功率相对应.加入前馈控制器GI(s)后,在稳态的理想情况下,GI(s)的输出就与i2完全相等,也就是说,电压调节器Gv(s)的输出为0.
在本设计中采用的前馈环节如图5:
3 仿真与实验研究
为了验证上述分析结果,用SIMETRIX进行了仿真和实验,并根据仿真结果进行实物制作,仿真和实验的参数如下.
输入电压范围:220V/50Hz
输出电压:400V
输出功率:400W
开关频率:100KHz
电感:0.75mH
输出电容:100uF/450Vthr 120Hz
图6、7为没有加入前馈控制时,负载由0到100%阶跃变化,直流输出电压和电源电流的仿真波形.从图中可以看到,由于只有电压调节器对整流器输入、输出之间的功率平衡进行控制,调节的速度比较慢,电源电流的幅值是逐步增大的.在调节过程的起始段,负载消耗的能量由交流电源和电容C共同提供,电容处于放电状态,造成了输出电压的跌落,电压波动的幅值接近40V,同时,调节时间也比较长,这同前文的分析是相符的.当直流电压Vc跌落的幅值比较大,使得Vc低于控制电源电流为正弦波所需要的最低电压时,电源电流会出现明显的畸变.

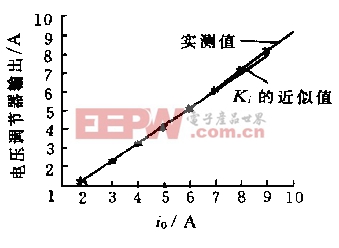
从图中可以看到,系统对负载电流的扰动具有很快的调节能力.电压只有突加负载的瞬时有一些极微小的波动.电流也瞬时接近稳态,保证了输入与输出功率的平衡.电压波动出现少许波动,主要由两方面原因综合所造成:(1)由于前馈控制器中没有包含整流器传递函数中有关时间常数的信息,但是整流器又存在着惯性,所以既使是电源电流的参考信号可以立即反映负载所需要吸收的功率,实际的输入电流都会有一定的延时,导致功率的不平衡,使输出电压跌落;(2)系统满载时,整流器当时的实际放大倍数比设计前馈控制器时放大倍数大,使得前馈控制器的输出所反映的输出功率大于负载实际需要的功率,这就使得直流电压有上升的趋势.以上两者相综合,产生两者对直流输出电压的影响结果.如果两者的作用恰好抵消,直流电压就不会出现明显的波动.
图8和图9所示分别为加入前馈控制器前后的实验波形.图10所示为没有加入前馈控制器时,直流输出电压跌落对电源电流造成的影响.图中箭头指示的是负载突加时间.实验结果和仿真结果相当接近.图9中输出电压的波动很不明显,主要是由于实验系统中的惯性时间常数比仿真所得到的时间常数小,使得整流器的延时和整流器放大倍数变大两者的影响相抵消造成的.

4 结 论
本文利用仿真和实验研究的方法,对BOOST型PFC加入前馈控制环节,得出如下结论:
(1)未加入前馈控制器时,电压调节器的调节速度较慢,使得输出电压出现了较大的波动,当输出电压低于控制电源电流为正弦波形所要求的最小值时,电源电流会出现明显的畸变;
(2)利用负载电流的前馈控制可以改善系统的动态特性,对前馈控制器进行了实验和仿真研究,仿真结果和实验结果相当一致.
参考文献:[1]MalesaniL,RossettoL,TentiP.AC/DC/ACPWMconverterwithreducedenergystorageintheDClink.IEEETransonIA,1995,31(2):287~2922
[2]HitiS,BorojevicD.Robustnonlinearcontrolforboostconverter.IEEETransonPE,1995,10(6):651~658.4 [3]DiegoRV,JuanWD,OoiBT.AnovelloadcurrentcontrolmethodforaleadingpowerfactorvoltagesourcePWMrectifier.IEEETransonPE,1994,9(2):153~159
- 基于软开关技术的能量恢复电路及其检测(12-09)
- 功率因数改善与高效的ROHM最新AC/DC电源技术(12-09)
- ucc28019_基于UCC28019的高功率因数电源(12-08)
- 高功率因数的单相全桥PWM整流电路原理(12-07)
- 贴士:基于功率因数校正的离线式开关电源设计(01-23)
- 在设计中最常见的几大功率因数误区 帮你校正(01-15)