基于前馈混合控制的BOOST型PFC控制器
时间:03-11
来源:互联网
点击:
1 引 言
近年来对大功率电源需求在不断增加,但是由于采用传统的非控整流开关电源,其输入阻抗呈容性,网侧输入电压和输入电流间存在较大相位差,加上输入电流严重非正弦,并呈脉冲状,故功率因数极低,谐波分量很高,给电力系统带来了严重的污染。因此具有单位功率因数的电源迅速发展起来。同时,功率因数控制器的输出端负载从轻载上升到满载的时候,由于输出电容上的电压未能马上上升到所需要的电压,因此接在功率因数控制器后面的DC-DC变换器的输出就出现了电压下降,经过瞬间变化才达到稳定输出。有时侯由于这个时间过长,会出现失调情况,影响设备的正常工作。因此解决这个失调问题成为当务之急。
为满足对直流电压纹波的要求,通常在直流侧接入一个大容量电容器进行滤波.这样虽满足了对电压纹波的要求,却严重影响了系统动态响应的速度[1].为提高整流器的动态响应速度,控制系统必须保证在负载变化时,能够快速而准确地维持输入与输出的功率平衡.若系统中的功率平衡完全依靠电压调节器进行调节,则系统响应速度较慢,会造成输出电压较大的波动[1~3].本文从仿真研究出发,引入负载电流的前馈控制.仿真和实验结果表明,利用负载电流前馈控制可以明显提高系统的动态响应速度.
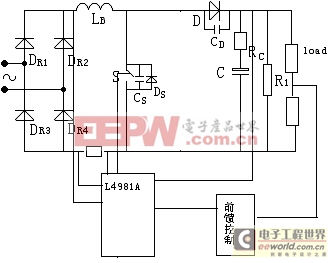
本论文提出了一种新颖的控制方法,就是在传统的模拟芯片的控制基础上加入了前馈控制,整个系统结构见图1.第一部分对加入前馈环节进行分析,第二部分进行仿真和实验研究,
2 前馈混合控制的研究与分析
2.1 平均电流控制:
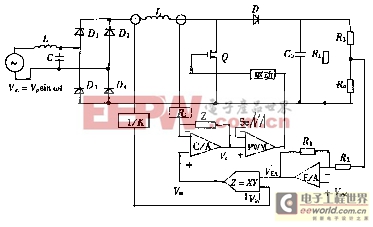
APEC控制的目的是使网侧电流紧跟网侧电压的变化而变化,从而达到功率因数校正的目的。APEC电路采用双环控制策略:外环输出电压反馈构成电压环,内环电感电流反馈则构成构成电流环。电压反馈提高了输出电压的稳定性;电流反馈则有利于提高瞬态响应速度,增强控制精度。图2的控制过程为:输出电压经电压误差放大器(E/A)进行PI调解后,送入乘法器(Z)的一个输入端,整流后的网侧电压经采样环节

2.2加入前馈控制
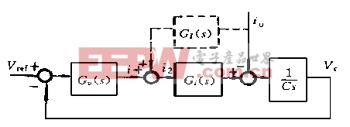
从图3可以看到,负载电流io对于整个控制系统来讲是一个外部扰动信号.当io发生变化时,首先影响到直流输出电压Vc,使Vc偏离设定值,然后通过电压调节器进行调节,可以逐步减小直到消除Vc同设定值之间的差,系统重新进入稳态.由于电压调节环的调节速度比较慢,在负载电流突然增大的开始一段时间内,整流器还不能提供负载消耗的全部能量.此时,直流侧电容C释放出所储存的能量和整流器一起向负载提供能量.当负载电流突然减小时,由于整流器提供的能量超出负载所消耗的能量,则多余的能量流向电容C,对其进行充电.正是由于这种在动态过程中输入与输出能量的不平衡,造成了直流输出电压的波动.
根据控制理论知识,前馈控制可以消除扰动对系统的影响,从而提高系统的动态特性.负载电流的前馈控制如图3中虚线部分所示,其中GI(s)为前馈补偿器的传递函数.根据图3,可以得到直流输出电压

若选取前馈控制器的传递函数为
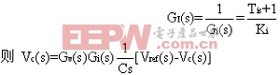
此时,可完全消除负载电流io的变化对系统直流输出电压Vc的影响.但前馈控制器GI(s)是否能够完全补偿io的扰动,取决于Gi(s)的结构和参数.由前面的分析可知,Gi(s)是一个小时间常数的一阶惯性环节,当系统运行在稳态时,Gi(s)相当于一个放大倍数为Ki的比例环节,此时可以精确地测定放大倍数Ki.实际上,由于系统中存在着非线性特性,在整个负载变化范围内,Ki并不是固定的.实验中测得的Ki与负载电流io的关系如图4所示.从图中可以看到:负载电流在1~7A区间时,整流器的放大倍数Ki基本上为一常数;在7~10A区间内,Ki略有增大. 可见,由于系统的非线性特性,在整个负载范围内,整流器的放大倍数是变化的.再加上整流器时间常数Ti也是随电压调节器输出i的幅值变化而变化的,因此,从理论上讲,设计一个能够完全补偿io扰动的前馈补偿器是不可能的.我们可以通过适当地设计前馈补偿控制器GI(s),对io扰动作近似补偿或者作稳态补偿,其余的部分再由反馈控制器作稍许调节,从而提高系统的动态性能.
- 基于软开关技术的能量恢复电路及其检测(12-09)
- 功率因数改善与高效的ROHM最新AC/DC电源技术(12-09)
- ucc28019_基于UCC28019的高功率因数电源(12-08)
- 高功率因数的单相全桥PWM整流电路原理(12-07)
- 贴士:基于功率因数校正的离线式开关电源设计(01-23)
- 在设计中最常见的几大功率因数误区 帮你校正(01-15)