基于SABER软件的数字控制电源系统的仿真设计
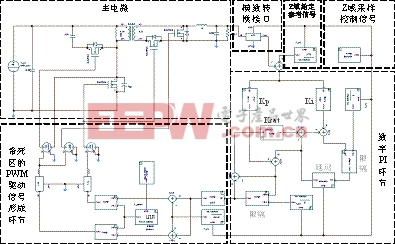
图5 数字控制模块电源仿真电路
通过调整电压环PI控制参数,获得稳态仿真波形见图6所示。波形自上向下依次为主管驱动、箝位管驱动、输出电压和占空比信号(即PI环输出)。从图中可以看出两驱动信号互补,并存在一定的死区时间,输出电压稳定在3.3V,纹波电压峰峰值为0.012V,PI环输出稳定。从占空比的波形上可以看出,占空比更新一次的时间为6个开关周期,即1个采样周期,这与实际的数字控制系统完全相符。图7给出了动态仿真波形,波形从上到下分别为卸载控制信号、满载到半载突卸时输出电压波形、加载控制信号和半载到满载突增时输出电压波形。
图6 稳态仿真波形
图7 动态仿真波形
将仿真获得的控制参数应用于原理样机,经过实验反复调试,得出一组较好的实际控制参数,见表 1。通过比较可以看出仿真参数与实际参数相差甚微,这有力地说明了该建模仿真方法对于控制参数整定具有重要参考价值。
表1 PI控制参数
PI参数 | 仿真参数 | 实际参数 |
Kp | 0.2 | 0.195 |
Ki | 0.1 | 0.003 |
Ksat | 0.015 | 0.015 |
从以上的论述和仿真可以看出这种数字控制系统的建模仿真方法很好地模拟了数字处理器内部数据处理的过程。它不仅可以用于原理性分析,而且对于数字控制系统的控制参数整定具有重要的参考价值。
5 结束语
本文在详细地分析数字处理器内部数据处理的机理的基础上,引入一种数字控制系统的建模仿真方法,并通过具体的实例演示了整个建模仿真过程,经过仿真分析验证了这种方法可以很真实地体现数字控制系统的数据处理过程,充分体现了数字控制的特点,它将为数字控制系统的控制参数整定和数字控制算法研究创造有利的条件。
参考文献:
[1]陈建业. 电力电子电路的计算机仿真. 北京:清华大学出版社,2003年10月
[2]张绍宁. 数字控制系统仿真方法. 战术导弹技术,2002年7月
[3]David M. Van de Sype, Koen De Gusseme, Alex P. Van den Bossche, and Jan A. Melkebeek. “Small-signal z-domain analysis of digitally controlled converters”. PESC 04. 2004 IEEE 35th Annual. pp. 4299~4305.
[4]赖寿宏. 微型计算机控制技术. 北京:机械工业出版社,2001年5月
[5]李春艳. 基于DSP的电源控制. 南京航空航天大学硕士学位论文,2003年
- 数字控制器提高DC/DC效率的策略分析(12-09)
- 巧妙提升数字控制电源性能的利器—MOSFET驱动器(12-09)
- 详述电源系统中数字控制器的应用设计(12-08)
- 解析电源系统中数字控制器的应用设计(12-08)
- 如何提升数字控制电源性能?MOSFET驱动器?(12-07)
- 数字控制技术在功率密度和电源管理上的应用(12-07)