最基础电学电路:仿生避障机器人制作
这是一个简单到令人发指的仿生避障机器人,仅由电池、开关、马达组成最基础的电学电路,就能表现出类似自然界生物的智能!在遇到障碍物时会掉头,看起来有 点象一只疯狂的小强。只要有基本的物理电学基础就可以自行制作了,你就不想自己做一个在朋友面前炫耀一下 这就是我做的智能机器人么?
一般智能的机器人都是用单片机芯片(MCU微处理器)做控制,简单一点的也需要由一些电阻、电容之类的电子元件组成的电子电路做控制。作为PVC系列机器 人的第一个项目,这里将介绍一个电路最简单的机器人,其不仅不需要单片机芯片,就连最普通的电阻、电容等电子元件也不用,完全是一个仅由电池、开关、马达 组成的最基础的电学电路,一般只要有基本的物理电学基础就可以自行制作了,也正因为如此,在本PVC系列教材没有进到深入内容的时候就对其进行介绍。
本项目主要面向DIY机器人的初学者,可以让大家回顾一下物理电学基础,然后侧重在练习动手制作能力,包括基本的机械结构的设计与制作,以及基本的电路连接技能。如果是对此已经非常熟悉的朋友,可以跳过本章节。

这是一个简单的避障机器人,所谓“避障”即避开障碍物,实际上就是遇到障碍物时会转弯掉头。
以下为效果视频,为了拍摄方便是放在一个小盒子里的,由于地方窄动作也比较快,看起来有点象一只疯狂的小强,如果放在地上则会满屋子跑,追都追不上。
在此,我给本项目的避障机器人再起一个外号——疯狂的小强,呵呵。
1基本原理
本项目的避障机器人采用三轮传动结构:前面左右两边的两个轮子是主动轮,各接一个电机作为动力;后轮是从动轮,起到平衡的作用。
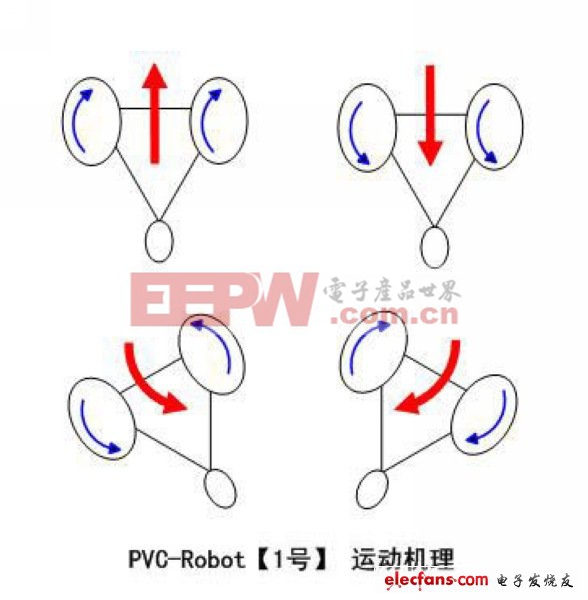
1.1运动机理
控制前面两个轮子的转动方向就可以控制整个机器人行进的方向:
1、左右两个前轮都向前转,则机器人向“正前方”直线前进;
2、左右两个前轮都向后转,则机器人向“正后方”直线倒退;
3、左前轮向后转,右前轮向前转,则机器人将以后轮为轴心逆时针转动,即实现向“右后方”转弯倒退;
4、左前轮向前转,右前轮向后转,则机器人将以后轮为轴心顺时针转动,即实现向“左后方”转弯倒退。
1.2控制原理
在机器人的头部用钢丝做两根触须,一左一右各连接到一个碰撞开关,分别控制两个前轮的旋转方向。
特殊注意一下,左右触须与对应控制的电机是交叉过来的,即:左边的触须连接右边的碰撞开关,控制右边的电机;右边的触须连接左边的碰撞开关,控制左边的电机。

(1)无障碍物
当前方都没有障碍物,左右两个轮子都向前正转,则机器人向“前方”直线前进。
(2)左前方有障碍物
当左前方有障碍物,在左边触须碰到障碍物时,控制右边的轮子反转,则机器人向“左后方”倒退并转弯,即方向转向了障碍物的右边,从而避开了左边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,左边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(3)右前方有障碍物
当右前方有障碍物,在右边触须碰到障碍物时,控制左边的轮子反转,则机器人向“右后方”倒退并转弯,即方向转向了障碍物的左边,从而避开了右边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,右边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(4)正前方有障碍物
当正前方有障碍物,左右两边的触须都会碰到障碍物,控制左右两边的轮子都反转,则机器人向“正后方”倒退,从而避开障碍物。
在直线倒退持续了一会后,左右两边的触须都不再碰到障碍物,则两个轮子都正转又变成直线前进;然后又会遇到正前方的障碍物又会直线倒退,再直线前进……如此反复变成一个死循环。
理论上会出现以上这样的问题,但是实际上并不会,因为无论是左右轮的摩擦系数有所差异,还是左右两组电机的驱动功率有所差异,或是左 右两组电机的电源的电量有所差异,又或是障碍物左右两部分表面的光滑程度有所差异,都会导致实际上左右两边的触须碰到障碍物有一个时间差,都无法做到两边 轮子同时反转,也就是说向后倒退的时候不是完全的直线而是会有所偏移。而且即便第一次是直线后退,但在往复几次碰撞之后肯定会出现偏移,最终解除循环避开 障碍物向新的方向前进。
在以上视频中,我们也可以看到这一有趣的一幕,机器人连续几次反复撞上“墙壁”,最后还是会重新转向另外的方向。
从视频中,我们除了看
- Power Architecture许可开放飞思卡尔e200系列内核助力SoC设计(09-17)
- 焊接机器人系统中的电源电路分析(09-17)
- 电子产品的静电放电保护技术与新装置的应用(10-10)
- 电力前沿技术----电能质量柔性控制装置(STATCOM)(11-12)
- 纳米发电机(02-21)
- 线性电源与开断电源的区别(11-14)