最基础电学电路:仿生避障机器人制作
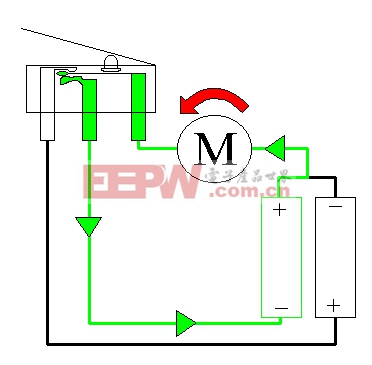
到以上这种特殊情况外,另外还有一种情况,就是有些时候机器人会卡在墙角停顿了好一阵,然后才转向。这是因为有些时候由于触须碰撞墙 壁的角度比较偏,不是正面碰撞,导致碰撞的力度不够,触须无法立即触发碰撞开关响应,而机器人在电机的推动下不断的挤向墙壁,缓慢的挤压后才触发了碰撞开 关控制转向,也就是看到了机器人在墙角停顿了一会才转向的情景。出现这情况,如果电机的输出功率不足,或是由于电池的电量下降导致动力不足,可能会导致机 器人在墙角无力挤压触发碰撞开关,最终变成卡死在墙角,这个时候要么是换大功率的电机,要么就是换新电池。 1.3电路原理 本项目的电路非常简单,由一个最基本的电学电路组成。 1、机器人的动力是由两个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,通过改变两个电极所连接电源的正负极,可以改变电机的旋转方向(顺时针或逆时针)。 2、电源为两节7号电池,每节电池作为一个独立的供电单元,每个电机某一时刻只有一节电池为其供电。如果前进时是一节电池供电,后退时则是另外一节电池以相反电流的方式供电。 3、通过三引脚的碰撞开关,可以控制电机采用哪一单元的电池进行供电,而碰撞开关则连接触须,触须被挤压则碰撞开关被触发。 下图为其中一个电机的控制原理。 4、机器人头部有两根钢丝作的触须,触须分别连接在两个碰撞开关上(注意两根钢丝对应的碰撞开关是交叉的,即:“左—右”钢丝,对应“右—左”碰撞开关)。 (1)没有障碍物时,触须没有被挤压,不触发碰撞开关,碰撞开关默认的通路,给电机供给一个“正方向”的电流,电机于是“顺时针方向”旋转。 (2)有障碍物时,触须被挤压,触发碰撞开关,碰撞开关断开默认通路,连接另外的一组通路,给电机供一个“反方向”的电流,电机于是“逆时针方向”旋转。 这里给出完整的电路原理图: 为了方便大家,这里再给出实物电路接线图供参考。 2准备工作 本项目需要的器材比较简单,主要包括:PVC线槽、小电机、电池/电池盒、碰撞开关、拨动开关、曲别针、螺丝、小齿轮/滑轮等。 以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。 主要的器材都可以从网上购买,我列出了一些淘宝上的网址,基本上我也是通过这个渠道进行采购的,供大家参考。 3制作过程 本项目为避障机器人,外号“疯狂的小强”,由此对机器人的各组成部分作一个划分,分别包括:上身、腹部、触须、前脚、后轮、电池、电机。 以下将按照加工的顺序,全程介绍本项目机器人的制作过程。 3.1上身结构 首先加工上身部分,主要是上身的外壳。 拿一段PVC线槽的凹槽部分,用剪刀先大概剪下一截(大于4厘米),准备进一步加工。 在剪下的一截PVC线槽上,用钢尺量出4厘米长度,用笔换好要剪裁的痕迹。 用剪刀对着笔的痕迹精确的剪裁。 再用笔在线槽的一边槽壁上作一个痕迹,大概保留2毫米的槽壁高度。 用剪刀沿着做好的痕迹精确剪裁。 得出如下这个形状的部件,即上身的外壳结构。 3.2前脚结构 接下来是


名称 规格 数量 采购预算/成本折算 来源 用途 PVC线槽 2.5CM宽度 1段 4元 / 1元 实体五金店 主要结构材料 小电机 微型1.5V电机,轴径1mm 2个 4.7元 淘宝:morehave 动力 电池 7号电池 2个 2元 实体日用品店 电源 电池盒 7号电池盒 1个 1元 淘宝:jianfei180 电源连接 碰撞开关 行程开关 2个 1元 淘宝:morehave 障碍探测 拨动开关 小拨动开关 1个 0.36元 淘宝:jianfei180 电源开关 小齿轮 内径0.95mm(电机轴径1mm) 2个 1元 淘宝:morehave 前轮“车轮” 胶管 自行车气门芯胶管 1条 0.2元 / 0.02元 实体五金店 前轮“外胎” 小滑轮 用皮带轮,或者用圆珠子都可以 1个 0.5元 淘宝:morehave 后轮 曲别针 标准钢丝文具别针 1个 2元 / 0.02元 实体文具店 后轮支架 钢丝 1段 2元 / 1元 淘宝:morehave 探测触须 接线端子 插簧接线端子 2个 2.5元 / 0.1元 淘宝:着迷zheng 固定触须 M1.2*5螺丝 1.2mm直径,长5mm 9颗 4元 / 0.36元 淘宝:精隆五金… 固定PVC材料 M2*6螺丝 2mm直径,长6mm,平头 2颗 2元 / 0.04元 淘宝:精隆五金… 固定电池盒 M2*10螺丝 2mm直径,长10mm,平头 2颗 2元 / 0.04元 淘宝:精隆五金… 固定轻触开关 M1.2螺母 1.2mm内径 9颗 15元 / 1.35元 淘宝:微型螺丝小王 固定螺丝 M2螺母 2mm内径 4颗 2元 / 0.08元 淘宝:精隆五金… 固定螺丝 合计 6.26元 / 14.57元 





- Power Architecture许可开放飞思卡尔e200系列内核助力SoC设计(09-17)
- 焊接机器人系统中的电源电路分析(09-17)
- 电子产品的静电放电保护技术与新装置的应用(10-10)
- 电力前沿技术----电能质量柔性控制装置(STATCOM)(11-12)
- 纳米发电机(02-21)
- 线性电源与开断电源的区别(11-14)