全数字化特种电源实时并机系统研究
时间:08-09
来源:互联网
点击:
1 引言
数字化电源在中大功率开关电源中应用广泛,通过数字通信技术实现并机均流控制成为并机技术研究发展的方向之一。数字通信结构简单,节点独立性强,便于实现复杂的控制算法,在此基础上衍生出许多并机控制方式。
随着并机功率的不断增加,网络资源利用率引起的系统延时问题也得到人们的关注。针对特种电源的工作性质,例如需要在高温、强电磁干扰、震动、磨损等工况下工作时间长等,其控制系统需要有较高的稳定性,数据通讯网络需要有较高的安全性和实时性。
这里对比了不同的网络拓扑结构,分析了CAN总线数据传输的实时性,在网络资源负载一定的情况下利用备用机提高并机系统的功率输出。最后,以集成有CAN总线的ARM芯片为核心,设计了针对特种电源的实时并机控制系统。该系统采用多任务实时系统结构,提高系统处理速度,并且设计实验验证了系统的均流特性和数据传输的实时性。
2 特种电源的数字化并机方案
2.1 并机均流方案
并机均流方案可分为输出阻抗法、主从控制法、平均电流自动均流法、最大电流自动均流法和外控制器法等。数字控制与数字通信的特点可以很好地实现平均电流法。
平均电流法是通过均流母线获得系统的平均电流,并与模块电流进行比较,通过均流处理得出补偿电流基准,能够精确实现均流的方法。但是模拟的均流母线上若出现短路或者不工作机,那么母线上电压将会下降到下限,引起故障。通过数字通信技术获得各个模块的电流,可有效地避免上述情况的产生。
2.2 网络拓扑的选择
常用的网络拓扑有环形网络拓扑、菊花链网络拓扑、总线式网络拓扑。环形网络拓扑具有结构简单,传输速度快等优点,但其数据要通过每个节点并沿着固定方向传输,若出现一个节点不工作将会使系统崩溃,而且其结构固定、可扩展性差。
菊花链式为相邻两个节点间数据相互交换的网络拓扑结构,这样可避免环形链中一个节点故障而引起的系统崩溃,并且具有较好的扩展性。由于其结构是点对点信息发送模式,所以到达主节点的信息就存在着不同的延时。因此,为保证数据的实时性,传输介质需要有较大带宽容量。
总线式网络拓扑是一点对多点的广播模式,具有结构简单,节点可扩展性好,支持热拔插等优点。在开关电源并机技术中采用较多的是CAN总线技术,其传输速度快,最高可以达到1 Mbps,并且抗干扰能力强,符合特种电源的工作要求。
3 CAN总线延时分析
上述CAN总线的优点可很好地满足平均电流法毫秒级的动态响应时间和特种电源对数据实时性和安全性的要求。根据文献中提供的方法可估算网络通道容量。假定控制算法中仅需每个模块的电压和电流,并且每个数据帧发送的帧头数据位为50%,则通道容量可近似为:
C=Nnnnbfos(1+50%) (1)
式中:N为每个节点需要传输的变量个数;nn为系统节点数;nb为每个字长的位数;fos为系统开关频率。
根据式(1)得出网络拓扑下并机个数的上限。CAN总线延时为:
Td=Td0/(1-D) (2)
式中:Td0为网络空闲时的有效延时;D为网络占用率,0≤D≤1。
根据式(2)可知,CAN总线并机不能盲目添加节点,当D=1时,总线延时无穷大。CAN总线延时由报文编码、仲裁延时、传输延时和报文译码组成。其中报文编译码是由控制芯片处理速度和报文结构选择决定,随着数字芯片的不断升级,此延时可忽略不计。因此,CAN延时主要由仲裁延时Tm和传输延时Cm决定。其中Cm的计算式为:
Cm={8N+44(64)+[8N+34(54)-1]/5)/S (3)
式中:N为报文中包含的数据个数:S为总线设定的波特率。
对于Tm则要根据总线状态与高优先级竞争总线的关系决定,此处假设Tm一定,对Cm进行分析。CAN总线在标准帧(扩展帧)Cm的计算公式,即数据从占用网络到释放网络所需要的时间,如式(3)所示。由式(3)知,当S=500 Kbps时,Cm为微秒级,满足并机实时性要求。
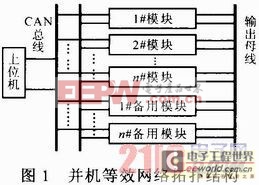
在基于总线结构的N+n(N,n为工作机、冗余机个数)并联冗余技术中每个模块工作在N/(N+n)的额定功率上,当系统中出现故障机时,故障机抽离,其他工作机平分多出的功率以实现输出功率恒定。此模式需要所用工作机实时占用网络,在进行并机扩展中可能会因为网络资源负担引起不必要的延时。而且在N较小时,模块处于低功率输出,此时输出效率较低。这里选用备用模块概念,提高正常工作模块的输出功率,减少其冗余的功率,如果故障机出现则使用备用机代替其输出,而且备用机在未触发启动时在总线中只做接听模块,并不占用网络资源。此外启动备用机的信号具有网络占用优先级,以保证备用机迅速启动。并机网络拓扑结构如图1所示。
数字化电源在中大功率开关电源中应用广泛,通过数字通信技术实现并机均流控制成为并机技术研究发展的方向之一。数字通信结构简单,节点独立性强,便于实现复杂的控制算法,在此基础上衍生出许多并机控制方式。
随着并机功率的不断增加,网络资源利用率引起的系统延时问题也得到人们的关注。针对特种电源的工作性质,例如需要在高温、强电磁干扰、震动、磨损等工况下工作时间长等,其控制系统需要有较高的稳定性,数据通讯网络需要有较高的安全性和实时性。
这里对比了不同的网络拓扑结构,分析了CAN总线数据传输的实时性,在网络资源负载一定的情况下利用备用机提高并机系统的功率输出。最后,以集成有CAN总线的ARM芯片为核心,设计了针对特种电源的实时并机控制系统。该系统采用多任务实时系统结构,提高系统处理速度,并且设计实验验证了系统的均流特性和数据传输的实时性。
2 特种电源的数字化并机方案
2.1 并机均流方案
并机均流方案可分为输出阻抗法、主从控制法、平均电流自动均流法、最大电流自动均流法和外控制器法等。数字控制与数字通信的特点可以很好地实现平均电流法。
平均电流法是通过均流母线获得系统的平均电流,并与模块电流进行比较,通过均流处理得出补偿电流基准,能够精确实现均流的方法。但是模拟的均流母线上若出现短路或者不工作机,那么母线上电压将会下降到下限,引起故障。通过数字通信技术获得各个模块的电流,可有效地避免上述情况的产生。
2.2 网络拓扑的选择
常用的网络拓扑有环形网络拓扑、菊花链网络拓扑、总线式网络拓扑。环形网络拓扑具有结构简单,传输速度快等优点,但其数据要通过每个节点并沿着固定方向传输,若出现一个节点不工作将会使系统崩溃,而且其结构固定、可扩展性差。
菊花链式为相邻两个节点间数据相互交换的网络拓扑结构,这样可避免环形链中一个节点故障而引起的系统崩溃,并且具有较好的扩展性。由于其结构是点对点信息发送模式,所以到达主节点的信息就存在着不同的延时。因此,为保证数据的实时性,传输介质需要有较大带宽容量。
总线式网络拓扑是一点对多点的广播模式,具有结构简单,节点可扩展性好,支持热拔插等优点。在开关电源并机技术中采用较多的是CAN总线技术,其传输速度快,最高可以达到1 Mbps,并且抗干扰能力强,符合特种电源的工作要求。
3 CAN总线延时分析
上述CAN总线的优点可很好地满足平均电流法毫秒级的动态响应时间和特种电源对数据实时性和安全性的要求。根据文献中提供的方法可估算网络通道容量。假定控制算法中仅需每个模块的电压和电流,并且每个数据帧发送的帧头数据位为50%,则通道容量可近似为:
C=Nnnnbfos(1+50%) (1)
式中:N为每个节点需要传输的变量个数;nn为系统节点数;nb为每个字长的位数;fos为系统开关频率。
根据式(1)得出网络拓扑下并机个数的上限。CAN总线延时为:
Td=Td0/(1-D) (2)
式中:Td0为网络空闲时的有效延时;D为网络占用率,0≤D≤1。
根据式(2)可知,CAN总线并机不能盲目添加节点,当D=1时,总线延时无穷大。CAN总线延时由报文编码、仲裁延时、传输延时和报文译码组成。其中报文编译码是由控制芯片处理速度和报文结构选择决定,随着数字芯片的不断升级,此延时可忽略不计。因此,CAN延时主要由仲裁延时Tm和传输延时Cm决定。其中Cm的计算式为:
Cm={8N+44(64)+[8N+34(54)-1]/5)/S (3)
式中:N为报文中包含的数据个数:S为总线设定的波特率。
对于Tm则要根据总线状态与高优先级竞争总线的关系决定,此处假设Tm一定,对Cm进行分析。CAN总线在标准帧(扩展帧)Cm的计算公式,即数据从占用网络到释放网络所需要的时间,如式(3)所示。由式(3)知,当S=500 Kbps时,Cm为微秒级,满足并机实时性要求。
在基于总线结构的N+n(N,n为工作机、冗余机个数)并联冗余技术中每个模块工作在N/(N+n)的额定功率上,当系统中出现故障机时,故障机抽离,其他工作机平分多出的功率以实现输出功率恒定。此模式需要所用工作机实时占用网络,在进行并机扩展中可能会因为网络资源负担引起不必要的延时。而且在N较小时,模块处于低功率输出,此时输出效率较低。这里选用备用模块概念,提高正常工作模块的输出功率,减少其冗余的功率,如果故障机出现则使用备用机代替其输出,而且备用机在未触发启动时在总线中只做接听模块,并不占用网络资源。此外启动备用机的信号具有网络占用优先级,以保证备用机迅速启动。并机网络拓扑结构如图1所示。
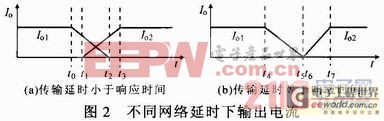
加入备用机算法可在提高并机模块功率输出的同时无需考虑模块的冗余问题,使得模块可以在较好的功率输出点,从而提高并机的输出效率。但备用机切换过程中数据延时会引起输出波动如图2所示。Io1与Io2之和为并机系统的输出波形(Io1为正常工作机的输出电流,Io2为备用机的输出电流),t0~t2(t4~t5)为工作机的关断响应时间,t1~t3(t6~t7)为备用机的上升响应时间,其中t1~t0(t6~t4)为Cm时间。当Cm在要求范围内,并机系统可视为输出恒定。当Cm大到一定程度后就会出现系统输出功率拉低的情况,此时其他电源将会承担缺少的功率输出,出现电源模块过载情况损坏并机模块,进而影响到并机系统的稳定性。所以网络选择要尽量减少其Cm,以避免出现图2b情况或者更甚。
4 软件设计
此处提到编码、译码延时由选用的控制芯片决定。该系统利用RTX实时系统内核,运用32位的ARM芯片进行系统设计和实验。
RTX内核是一个实时操作系统,可以同时运行多函数或是任务,其进程切换时间小于5μs,中断停止时间小于1.8μs(在LPC21xx上执行,系统时钟60 MHz)。RTX采用时间片抢占模式实现系统的实时操作,可通过软件对其时间片时间进行设置,实现程序流程的优化设置,并通过任务的优先级设置提高数据通讯的实时性。
由于备用电源的接入和故障机的退出都需要有较好的实时性来满足整个并机输出的稳定性,所以采用实时操作系统能很好地使用系统周期,避免因程序等待使得系统在处理数据上出现延时,影响并机输出的稳定性。
4.1 均流控制算法
图3示出均流控制算法和程序流程图。
- 特种电源正接地与负接地浅谈Q&A(04-19)
- 特种机器人的低电压大功率电机驱动系统设计(12-09)
- 一种无主从自均流逆变器并联装置的设计(08-23)
- 高频开关的采用平均电流值法实现自动均流控制(09-28)
- 并联型高频开关直流电源的系统设计(08-29)
- 采用同步整流和均流cPCI接口次级电源控制器提高通信电源性能(05-16)