基于TLV2374的弧线电机电流采样系统
目前天文望远镜常用的传动方式主要为蜗轮蜗杆传动、齿轮传动、摩擦传动、和直接驱动等方式。这里采用直接驱动式望远镜机架,采用组合式弧线交流PMSM。直接驱动将电机与负载直接耦合在一起,提高了系统可靠性,但对电机本身运行平稳性及超低速提出了更高的要求。
电流环在伺服驱动系统中占有重要地位,直接决定伺服系统的好坏,很多文献都对电流采样进行了研究。电流环是望远镜驱动控制系统的内环,电流采样的精度和速度直接影响整个电流环的运算精度,从而对望远镜机架驱动跟踪性能产生重大影响,电流环的设计是保证望远镜跟踪目标的速度精度及力矩平稳性的关键部分。在此设计了基于单电源供电的电流采样电路,并采用TMS320F2812实现电流采样环节的A/D转换,为后续控制器的设计提供了方便。
2 机架驱动电流采样电路设计
采用弧线交流PMSM,定子直径为2.5 m,转子直径为2.2 m,15组定子单元,60对极的磁极组成转子,每组定子单元与4对极的转子组成一台弧线型交流PMSM,共由15组单元电机组成。其中任意一台单元电机可独立工作,也可和其中的几台电机一起工作。2.5 m直接驱动电机可驱动口径为4 m的望远镜。电机参数:额定功率3 kW;额定电压380 V;额定电流12 A;额定频率0.533 Hz;转动惯量262.74kg·m2;额定转速4 r·min-1;定子电阻33 Ω;极对数为60。
目前常用的控制器有单片机、ARM及DSP等数字系统。电机输出的电流是模拟信号,在此选取TMS320F2812实现A/D转换,电流采样电路是单电源供电的TLV2374。根据电机参数,电流传感器采用LTS25-NP。
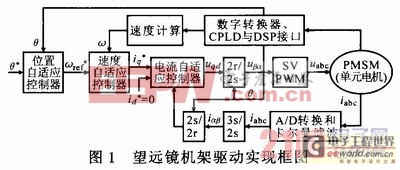
2.1 望远镜机架驱动实现总框图
所设计的电流检测电路将弧线交流PMSM的三相定子电流经电流传感器后进入DSP的A/D口,将其转换为数字信号,便于控制器及逆变器信号的处理。由于弧线电机的定子绕组采用Y接法,则有ic=ia+ib,因此只需要检测其中两相电流,即可得到三相电流。交流PMSM要想实现高性能的闭环控制,电流反馈环节必不可少,只有检测出定子绕组的电流,才能为逆变环节即SVPWM算法的实现提供基础。由PMSM工作原理可知,定子电流检测的精度和实时性是决定整个矢量控制系统精度的关键。
对于精密弧线电机,驱动望远镜时,闭环才是保证跟踪目标和图像质量的首选控制方式,能实现高精度、高性能的传动和伺服控制。另外,一个完善可靠的驱动系统在硬件上包括过压、欠压、过流保护等各类故障检测和保护电路,这些电路均需检测电机的电压和电流信号。弧线交流PMSM的驱动系统由位置环、速度环、电流环组成,图1示出望远镜机架驱动实现总框图。
2.2 TLV2374电流采样电路设计
TLV2374器件是单电源供电运算放大器,具有轨对轨的输入输出能力,最低操作供电电压至2.7 V,轨对轨的摆幅输出特性,可提供3 MHz的带宽,仅需550μA的工作电流,最大工作电压可达16 V。经过长时间的研究及实验,这里给出单电源供电的电流采样系统的详细设计过程。
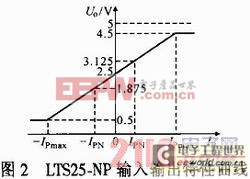
系统采用的电流传感器IXS25-NP是闭环原理的传感器,5 V单电源供电,使外围的硬件电路设计更简单,无需增加电压抬升电路,从而减少了电源对系统的干扰。该电流传感器温漂小,精度高,采样电阻是内置式的,为电压型输出,避免了出现因增加外接采样电阻及运放后进入DSP使精度有所降低的情况,输出特性曲线如图2所示。
电流传感器的接法共有3种,按其中一种接法,电流传感器的输出电压范围是1.9~3.1 V,该范围的电压不能直接送入到DSP的A/D(0~3 V)进行转换,且电压范围过小,必然降低A/D转换器的转换精度,为充分利用A/D转换器,在此根据实际A/D转换结果,设计了电流采样电路,将满量程时信号的输出范围调整到0~2.8 V,实验证明超过2.8 V将导致有时输出是饱和状态,为预防电路在非正常情况下损坏DSP的A/D接口,电路中增加了限幅电路。设采样电路输入为Uin,范围是1.9~3.1 V,采样电路的输出为Uo,范围是0~2.8 V,设输入输出为线性关系,则有:
Uo=AUin+B (1)
根据输入输出之间的关系,计算出A=7/3和B=-133/30,即:
Uo=7Uin/3-133/30 (2)
由式(2)知输入输出的实质是由运放构成的减法电路,设计出单电源运放组成的减法电路即可。由于TLV2374是单电源供电,可知其供电电压正电源是5 V,负电源是2.5 V,在此采用电压基准芯片并调整得到2.5 V基准电压,若设电流传感器的输出为Uin1,2.5 V基准电压为Uin2,则有:
Uo=7Uin1/3-133Uin2/75 (3)
选择合适的电阻实现该采样电路。图3为电流传感器的检测采样电路,共有4级处理:第1级进行阻抗变换;第2级是二阶有源滤波电路;第3和第4级是上式算出的减法电路,其中,为保证输入输出为式(3)的关系,有意在比例电路部分放置了两个1/1 000的精密可调电阻来调节输入输出的线性关系。需注意在使用单电源供电的运放时,比例增益都是相对同相端的电压而言。
实际调试中,由于经传感器出来的电流信号有高次谐波及其他干扰信号,因此必需设计硬件滤波器进行抑制,该系统设计的二阶低通滤波器的电流检测电路位于上述情况中的第2级,在此考虑到精密弧线电机的超低速,所设计低通滤波器的截止频率为10 Hz,注意电容值的选取,反相端电容通常是同相端电容的2倍,电流采样电路具体实现如图3所示。
- 基于变系数滑模观测器的PMSM伺服系统(03-11)
- 一种带失调自校正运放的电流采样电路设计(07-28)
- 滞环恒流LED驱动电路的电流采样电路(04-21)
- 经典回顾:线性光耦在电流采样中的应用(03-06)
- 一种用于线性稳压器LDO的限流电路(01-24)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)