基于变系数滑模观测器的PMSM伺服系统
摘要:为改善永磁同步电机(PMSM)伺服系统的控制性能,在分析PMSM数学模型的基础上,提出了基于变系数滑模观测器的无位置传感器PMSM伺服系统控制方案。设计了滑模观测器,通过加入低通滤波器(LPF),协调LPF和滑模观测器的参数,改善了滑模观测器带来的抖动干扰。利用磁场定向控制原理,根据估算参数,实现了无位置传感器的PMSM矢量控制。样机实验结果表明,所提出的控制方案提高了系统的鲁棒性和伺服性能。
关键词:永磁同步电机;滑模观测器;无位置传感器;矢量控制
1 引言
为实现对PMSM的精确控制,需要准确检测转子的位置或速度信息,为降低伺服系统的成本、体积,提高其可靠性,可采用无位置传感器的PMSM控制方法。其中,基于滑模观测器的控制方式因具有对参数变化及扰动不敏感、响应快速、瞬态性能好、易于数字化实现等优点而备受关注。
此处采用一种变系数的滑模观测器控制结构,在获取滑模变量时采用LPF滤除高频谐波,通过补偿方式消除低通滤波带来的相移问题,并采用抗饱和积分环节消除积分饱和效应。最后通过实验证明了设计的正确性和合理性。
2 PMSM数学模型
在简化分析中,静止α,β坐标系下PMSM的数学模型可表示为:
为高频开关信号,由此得到: 中的es也为高频开关信号。在滑模面上作滑模运动时,由于开关时间和空间上的滞后,使滑模观测器呈现固有的抖振现象,可通过对es进行低通滤波从而得到连续的反电势估算值:
中的es也为高频开关信号。在滑模面上作滑模运动时,由于开关时间和空间上的滞后,使滑模观测器呈现固有的抖振现象,可通过对es进行低通滤波从而得到连续的反电势估算值:
估算反电势取决于两个因素:滤波器系数和电流误差信号。电流误差信号可通过加大噪声的滤波强度使估算反电势的波形变得更光滑,即降低滤波的截止频率。但越加大滤波力度,造成的相移越大,对角度补偿的难度和误差也就越大,因此不能单纯地修改滤波器的系数。而另一个因素则是电流误差信号,波形的噪声信号反映了滑模变结构在滑动模态下的抖振现象,滑模抖振是必定存在的且不能消除。此处采用一种简单的方法来抑制滑模抖振,即协调滑模增益,使滑模增益根据电流的峰值而变化成为一种可行的办法。
3.2 转子位置估算
由于采用了LPF来获得反电势,不仅幅值发生了变化,同时也引入了相位延迟,导致所求的转子位置角度滞后一定角度。滞后角度与截止频率和电机转速有关。因此需要根据LPF的频率响应做一个相位延迟表,来获取运行时相应转速ω的相移角△θ,对 进行补偿,最后得到转子转角估算值
进行补偿,最后得到转子转角估算值 。
。
3.3 转速估算及转向判定
转速的估算可由转子位置的估算值得到,即 。转速的方向也由转子的位置估算值得到:
。转速的方向也由转子的位置估算值得到: 。
。
与转子位置获取相似,为保证转速估算值的平滑性,在其后加一个一阶LPF。滑模观测器的结构图如图1所示。
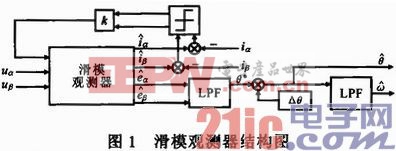
为验证设计的正确性和可靠性,设计了基于上述滑模观测器的无传感器PMSM伺服控制系统,其结构如图2所示,包括一个速度外环和两个电流内环。
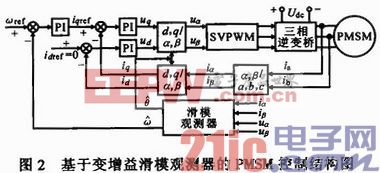
系统采用dsPIC6010A作为控制器,PMSM的标称参数为:额定转速6 000 r·min-1,工作电压300 V,绕组相电阻12.5 Ω,绕组相电感0.58 mH,极对数为3。为便于观察参数的详细情况,通过串口与控制器进行通讯,并将控制器的各个参数、信号实时显示在上位机调试平台。
DSP采样得到的电流实时波形如图3,4a所示。


图3a上半部分是在滑模增益固定不变时,经Clark变换后的电流波形,下半部分是电流误差开关信号。可见,经Clark变换后的电流虽很小,但估算的电流含有高频的开关信号,电流存在较大干扰。为进一步消除噪声干扰,采用滑模增益,根据电流的峰值变化的方法选择合适的滑模增益,同时适当修改滤波器系数,所得实验波形如图3b所示。图中上半部分是经Clark变换后的电流波形,下半部分则是电流误差开关信号即对变换后的电流进行估算所得到的波形。可见,估算电流波形所含噪声大大减少,电流波形互错90°且波形接近Clark变换后的电流波形。
图4示出估算反电势与Park逆变换后输出波形、估算转子位置及d,q轴电流波形。
图4a上半部分为对电流误差信号进行滤波得到的估算反电势波形,下半部分则为经过Park逆变换输出的uαuβ。图4b上半部分为估算的转子位置波形,下半部分为得到的id和iq波形。可见,经过合理设计滤波器,得到的转子位置信号比较光滑,纹波小;而由此得到的id和iq为常量。
5 结论
针对PMSM的无位置传感器的伺服系统,提出了一种基于变系数滑模观测器的控制方案,采用协调低通滤波器参数和滑模观测器系数的方法来抑制滑模观测器固有的抖动问题。最后,通过实验验证了方案的正确性和可行性。整个方案简单、易于数字化实现,具有广阔的工程应用前景。
永磁同步电机 滑模观测器 无位置传感器 矢量控制 相关文章:
- 电网电压不平衡下直接功率矢量控制(02-16)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)