基于空间电压矢量电力机车四象限整流的研究
摘要:本论文侧重于三相电压型PWM整流器及其控制系统的工程设计与实现,以提供一种较为实用的控制器设计与选取方法。论文主要内容包括算法研究、控制器设计、装置开发、样机仿真。介绍了四象限整流器为核心的电力机车系统,阐述了四象限整流器的运行原理及控制电路设计。提出一种简单的空间电压矢量算法,该算法在矢量区间判断上采用非坐标变换法进行判断,给出了在各个扇区中的矢量选择以及作用时间的计算公式。这种改进方法对SVPWM控制算法有一定程度的简化,从而使其更易于数字化实现。最后建立了Matlab/Simulink环境下的仿真模型,对上述控制算法进行了仿真,仿真结果验证了控制算法的正确性和可行性。同时,这种控制算法亦能使整流系统的能量双向流动,实现能量再生,且具有控制算法简单,直流电压利用率高的特点。
叙词:四象限;整流器;PWM;空间电压矢量 电源
Abstract:This dissertation focuses on the engineering design and realization of high power three-phase Voltage Source Rectifier (VSR) with emphasis on the control technique. The dissertation work, covering the methodology study, controller design, prototype implementation and experiment, is presented as following. Electric locomotive system mainly concentrated on 4-quardant rectifier is stated. Circulate principle and Control system design of electric locomotive 4-quardant rectifier are presented .A simplified algorithm is proposed in this paper for space voltage vectorwhich adopting non-standard vertical reference frame to judge the vector sector and calculate the action time. The ways make the calculate load of the SVPWM reduced and more easily digital applied. At last, the whole simulation module of control system is built up under the power MATLAB/SIMULINK platform and the above several ways are used in the simulation module. The result of the simulation proves that control ways are right and feasible. At the same time, from the concrete analysisthe rectifying system applied the simple algorithm can make the power bi-directional flow. Moreover, its control algorithm is easy and the range of DC utilizing efficiency is large.
Keyword:4-quardant;Rectifier;PWM;Voltage space-vector
1引言
自1879年世界上第一条电气化铁路建成以来的100余年时间内,人们不断地作出努力,试图制造出具有实用价值的交流传动电力机车。随着电力电子学和微电子技术的崛起和进步,半导体的出现和发展,使情况有了巨大的转机[1]。1964年的分谐波控制的逆变器(即现在的脉宽调制逆变器)、1973年提出的在载波整流理论的基础上研制的所谓四象限脉冲整流器、1971年提出的磁场定向控制和1985年提出的直接转矩控制方法[2],把逆变电路中的PWM技术应用于有MOSFET、IGBT等全控器件组成的整流电路,工作时可以使网侧电流正弦化,运行于单位功率因数,能量可以双向流动,真正实现绿色电能转换,因而备受关注。这种整流器称为PWM整流器[3]。综上所述,本文采用PWM四象限整流,则功率因数、能量回馈等指标都可以得到满足。因此四象限整流技术应用于电力机车成为一种科学的控制方式。
2 PWM整流器的选择
2.1四象限运行原理

图2.1 PWM整流器模型图
图2.1所示为PWM整流器模型电路。从图可以看出:PWM整流器模型电路由交流回路、功率开关桥路以及直流回路组成。其中交流回路包括交流电动势 以及网侧电感L等;直流回路包括负载电阻 及负载电势 等;功率开关桥路可由电压型或电流型桥路组成。
当不计功率桥路损耗时,由交、直流侧功率平衡关系得[4]:

由式(2-1)不难理解:通过模型电路交流侧的控制,就可以控制其直流侧;反之亦然。其中交流侧电感吸收无功功率是由直流侧提供的,也就是说整流器需要有反馈的能力。四象限脉冲整流器能够执行脉宽调制和能量变换,即整流和反馈两方面功能[5]。作为电力牵引用的整流器,实现牵引、制动状态下的前进、后退四种工况。反馈:通过IGBT将直流能量逆变为交流,因此可以实现PWM整流器四象限运行。
2.2主电路拓扑结构
本文采用三相半桥电压型PWM整流器拓扑结构。
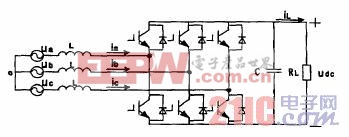
图2.2 三相半桥电压型PWM整流器
图2.2为三相半桥PWM整流器拓扑结构,其交流侧采用三相对称无中线连接方式[6],采用了6个功率开关管,这是最
象限 整流 研究 机车 电力 空间 电压 矢量 基于 相关文章:
- 应用于海水淡化之电压双象限升降压转换器(12-08)
- 透彻分析:电压双象限Buck-Boost电路拓扑(12-07)
- 基于台达AFE2000的四象限变频控制(09-03)
- 四象限变流器双闭环电流控制的研究(03-29)
- 单象限降压型电路工作原理简介(12-19)
- 牵引变流器技术及经济效益分析(09-03)