基于空间电压矢量电力机车四象限整流的研究
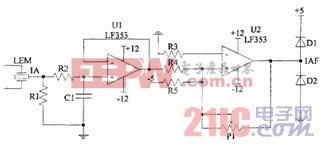
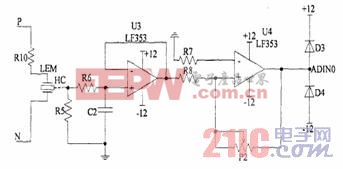
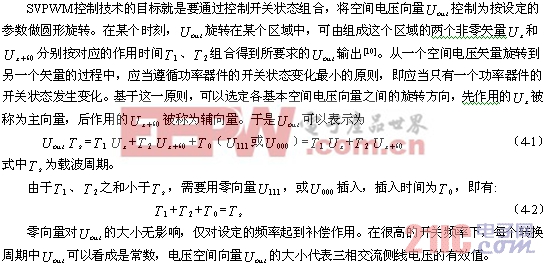
常用的三相PWM整流器拓扑结构。三相半桥PWM整流器较适用于三相电网平衡系统。 3系统硬件设计 3.1控制系统总体框图 图3.1 三相电压型PWM整流器模块功能原理图 3.2检测电路设计 1、三相交流电流检测电路 定子电流检测的精度和实时性是整个矢量控制系统精度的关键,对电流检测要求精度高和速度快,本系统采用北京莱姆公司生产的LEM霍尔电流传感器模块来检测电流[7]。它的工作电压为 12V,由于霍尔输出的是弱电流信号,因此开始时得把霍尔电流信号转化为电压信号,然后再经过滤波放大处理,又由于霍尔输出的是有正反方向的电流信号,而TMS320LF2407中的A/D转换器的输入为0~+5伏的电压信号,因此得有电平偏移电路。设计中先将霍尔的电流信号通过电阻转化为电压信号,由于电流反馈具有较大的噪音纹波,因而采用低通滤波电路。然后用-5伏电压基准把正负电压信号变换为TMS320LF2407需要的单极性电压信号,为了防止电压过高或过低,设计了由二极管构成的限幅电路。如图3.2则是实现A相电流采集的电路原理图。 图3.2 交流电流检测电路 2.三相交流电压检测电路 感应电机交流定子电压的监测方法有光耦直接检测法和电压传感器检测法[8]。本系统采用LEM电流霍尔测压法。(即:由霍尔元件串一个电阻,然后并联到主回路,通过MAX197检测霍尔的电流大小来间接的反映直流侧电压)。其信号处理电路如图3.3。 图3.3 交流电压检测电路 其中R10为25K /10W,转换比为1000:2500,当原边为10mA时,输出为25mA。同样第一级仍然是低通滤波,后一级采用比例环节把电压信号放大。 4.系统软件设计 SVPWM控制可以提高电压利用率和电动机动态响应性能。在相同的直流电压条件下,可提高网侧电压设计,相对就减少了网侧电路,降低了网侧及功率管损耗,提高运行效率,同时开关频率低,功率管损耗低。因此SVPWM控制为四象限整流最佳控制方式。 4.1控制策略 本文采用电压外环和电流内环的控制策略。首先输出直流电压与给定电压比较,然后经过PI调节器,得到三相参考电流幅值Im,将 Im与交流电压相位信号相乘后,得到参考电流信号Im, Im与实际电流比较得到电流误差,经过PI调节器,用以减缓电流在动态工程中的突变,然后再与输入电压的空间矢量进行比较控制,然后由DSP的全比较单元输出IGBT所需的控制脉冲[9]。 4.2控制原理 (1)系统区间的判断 三相电压型整流器的上桥臂和下桥臂开关状态互补,故可以用三个上桥臂的功率器件的开关状态来描述整流器的工作状态,记功率器件开通状态为“1”,关断状态为“0”,则上桥臂的开关状态有八种组合,用[a,b,c]表示上桥臂的状态[11]。对应于不同组态时输出给电机的相、线电压对应值(相对应于三相半波整流后的直流电压 )如表4.1所示。 表4.1三相电压型整流器的导通组态 A B C Va(Ud) Va(Ud) Va(Ud) Vab(Ud) Vab(Ud) Vab(Ud) 0 0 0 0 0 0 0 0 0 1 0 0 2/3 -1/3 -1/3 1 0 -1 1 1 0 1/3 1/3 -2/3 0 1 -1 0 1 0 -1/3 2/3 -1/3 -1 1 0 0 1 1 -2/3 1/3 1/3 -1 0 1 0 0 1 -1/3 -1/3 2/3 0 -1 1 1 0 1 1/3 -2/3 1/3 1 -1 0 1 1 1 0 0 0 0 0 0 A,B,C之间共有八种组合,但由判断扇区的公式可知A,B,C不会同时为1或同时为0,所以实际的组合是六种,A,B,C组合取不同的值对应着不同的扇区,并且是一一对应的,因此完全可以由A,B,C的组合判断所在的扇区。为区别六种状态,令: S=A+2B+4C (4-5) 通过查表4.2,可以判断矢量所在的扇区。 表4.2 S与扇区数N的对应关系 S 1 2 3 4 5 6 扇区数N 2 6 1 4 3 5 (2)矢量作用时间计算 表4.3 各扇区作用时间 扇区号 1 2 3 4 5 6 T1 Z Y -Z -X X -Y T2 Y -X X Z -Y -Z 在每个PWM周期里非零开关向量和零开关向量的顺序的安排也是该考虑的问题。不同的切换模式发出不同的PWM波形,切换模式主要由软件来完成。切换模式有如下特点[12]: (1)每个PWM周期内,每个PWM通道均切换两次; (2)对于每个扇区的PWM通道有一个固定的切换顺序: (3)每个PWM周期都是以U000开始,以 U000结束。 (4)每个PWM周期内,U000 与 U111维持的时间一样长。 4.3 实现步骤 将PWM输出方式开启至方式000或者111。它们与第二类输出方式之问只有1位的差别; (4)在减计数期间,当CMPR2和通用定时器1发生第二次匹配时,将PWM输出置回到第二类输出方式; (5)在减计数期间,当CMPR1和通用定时器1发生第二次匹配时,将PWM输出置回到第一类输出方式。根据以上原理,我们就可以程序中实现SVPWM波形的实时生成。 5.仿真结果分析 在实验室就本控制系统进行全数字实现,图5.1为IGBT SVPWM整流的实验波形。观察可知,本系统利用PWM控制技术使输入侧电流波形接近为正弦,与输入侧电压基本同相。由于程序计算有一定的延迟,使输入侧电压与输入侧电流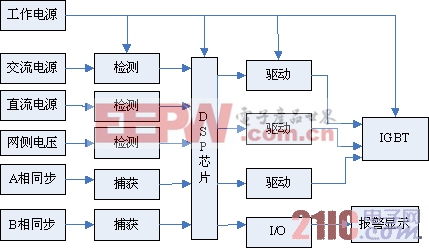

(3)开关切换顺序的确定
![]()
象限 整流 研究 机车 电力 空间 电压 矢量 基于 相关文章:
- 应用于海水淡化之电压双象限升降压转换器(12-08)
- 透彻分析:电压双象限Buck-Boost电路拓扑(12-07)
- 基于台达AFE2000的四象限变频控制(09-03)
- 四象限变流器双闭环电流控制的研究(03-29)
- 单象限降压型电路工作原理简介(12-19)
- 牵引变流器技术及经济效益分析(09-03)