新型注入式混合有源滤波器控制算法的研究
摘要:非线性负载在电网中的大量使用导致了电能质量的恶化,因此需对谐波污染进行治理。基于一种新型35 kV注入式混合有源电力滤波器(IHAPF),在传统递推积分PI控制及滞环控制理论基础上改进了二者的缺点,提出了一种复合控制方法,可快速无差地跟踪指令信号。仿真及实验验证了所提方法的有效性及正确性。
关键词:有源电力滤波器;谐波抑制;无功补偿
1 引言
电力电子装置等非线性负荷在电网中的大规模应用造成电网的谐波污染,而用户对电能质量的要求越来越高,因此需研制电能质量控制装备以改善电能质量。无源滤波器只能固定滤除特定次谐波并可能与电网发生串并联谐振;并联型APF结合了开关和滤波器二者的优点,是电能质量治理的主要研究方向。大功率IHAPF改进了传统并联谐振型混合APF的拓扑结构,可对有源部分的交流侧进行稳压,避免了额外的整流电路,可达到工程应用的目的。
电流跟踪控制方法的优劣在于控制系统的实时性、动态性能和控制精度。基于新型35 kV的IHAPF,在分析多种控制方法的基础上,提出了复合控制方法。复合控制基于滞环控制及递推积分PI控制理论,克服了滞环控制有差调节、电流开关毛刺较大以及递推积分PI控制稳态到达时间长的缺点,实现了这两种控制方法的有机结合。
2 拓扑结构分析
对于传统的并联混合APF有源部分,交流侧并联的基波谐振支路使有源部分不承受基波电压,大大减小了有源部分的容量,使其适用于较高的电压等级。但由于基波谐振支路的存在,只能通过加入额外的整流设备对直流侧电容进行充电,在实际运行时,由于电网电压波动及负载变化等原因会造成交流侧能量的倒灌,从而引起直流侧电压抬升,严重影响系统的可靠性及稳定性。
新型IHAPF的拓扑结构如图1所示,在拓扑结构上针对上述问题进行了改进。逆变器输出经过滤波电感后与分压电感并联在变压器的初级,变压器的次级串联单调谐支路并入电网。
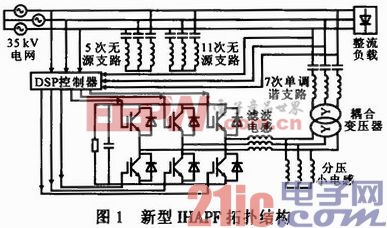
耦合变压器的作用是电气隔离。有源逆变器交流侧的电感基波等效阻抗远低于变压器次级的单调谐支路等效阻抗,因此基波分压很小,有利于减小其容量。由于分压电感承受一定的基波电压,所以可控制有源部分直流侧及分压电感上的有功能量的交换来稳定直流侧电压,避免了额外的整流电路,提高了系统的稳定性及安全性。
3 混合补偿装置的控制方法研究
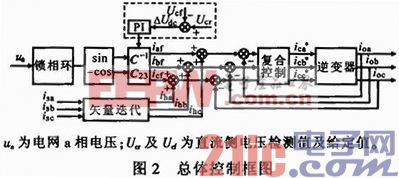
系统整体控制框图如图2所示。控制方法采用电压外环、电流内环的双环控制策略,电流内环实时检测电网侧三相电流信号,经过矢量迭代算法计算出补偿信号,作为逆变器的指令电流;通过复合控制使逆变器输出电流跟踪指令信号;电压外环的跟踪误差经PI调节,输出的直流信号转化为交流后叠加到谐波参考信号上。
3.1 补偿信号获取
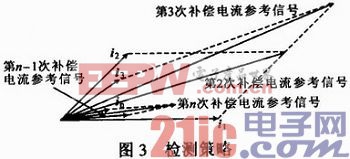
使用迭代修正法获取参考信号的检测策略如图3所示。假定系统第一次检测电网中的谐波电流为i1,通过快速傅里叶变换计算出特征性谐波电流的幅值和相位,为第一个周期的谐波参考信号,有源部分发出谐波后由于分流等原因导致电网中的谐波电流未完全补偿;系统第2次检测电网中谐波电流为i2,系统将i1和i2的矢量和作为第2次补偿电流参考信号,用来弥补第1次补偿时的误差;依次类推,系统将i1,i2,…,in-1和in的矢量和作为第n次补偿电流参考信号作为补偿信号。系统不断地对补偿时产生的误差进行修正,随着迭代次数n的增大,补偿时产生的误差将无限减小,电网中的谐波电流将无限趋近于零。
3.2 直流侧电压控制
通过控制基波有功能量的交换来控制直流侧电压稳定的步骤为:①实时检测直流侧电压信号Ucr;②检测值与给定值之差△Udc经PI调节得到调节信号,叠加到瞬时有功电流的直流分量上,使APF补偿电流中包含一定的基波有功电流分量。
3.3 电流控制算法研究
在传统递推积分PI控制及滞环控制基础上,提出了复合控制算法,避免了滞环控制有差调节、电流开关毛刺较大和递推积分PI控制稳态到达时间长的缺点,实现两种控制方法的有机结合。
3.3.1 递推积分PI控制分析
首先对整个系统进行建模,IHAPF单相系统等效图如图4所示。
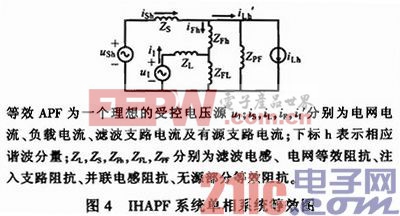
控制电流ii对逆变器输出电压ui的传递函数为:
系统的电流闭环传递函数框图如图5所示。
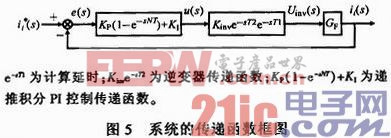
由系统闭环传递函数可得其频率特性方程为: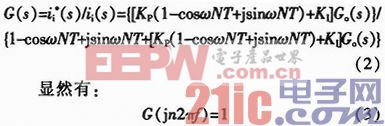
式中:n为整数;f为基波频率。
式(3)说明递推积分PI控制算法可使输出电流对参考信号的跟踪误差趋于零。
3.3.2 复合控制分析
由于积分环节的存在,其动态性能不够好。滞环控制算法跟踪速度较快,但存在稳态误差以及带来的开关谐波不易滤除等缺点。
复合控制算法传递函数的原理是通过对滞环环宽的设置,判定等效控制的投入,当误差e较大时,滞环控制起作用,快速跟踪起主要作用;当误差e小于一定值之后,精确治理起主要作用。
按照上述分析得以下控制规律: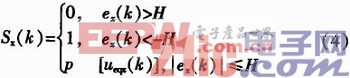
式中:x=a,b,c;p[ueqx(k)]为开关状态;ueqx(k)由递推积分PI控制算法确定;H为环宽。
4 仿真及实验
将所提出的复合控制算法应用到IHAPF拓扑结构中进行仿真。仿真软件采用PSIM4.1。系统参数:网侧线电压设置为工频35 kV;有源注入支路为7次单调谐支路,参数:电容为2.7 μF,电感为73.57 mH,并联电感为8 mH;采样频率为10 kHz。
图6为分别采用递推积分PI控制及复合控制算法时波形。由图可见,采用复合控制算法时,系统可以较快地使跟踪误差e达到一定范围之内,而递推积分PI控制需要较长时间。
- SAPF安装点的选择及对邻近负载影响的分析(09-10)
- 有源滤波装置的双向DC/DC变换器研制(08-23)
- 一种微电网背景下的新型电能质量调节器(12-24)
- 直流侧APF主电路参数与补偿性能的关系(03-11)
- 有源电力滤波器在大功率变频器供电电网中的应用(02-26)
- 一种双向储能变流器并网控制策略研究(08-21)