[数字电源系列文章]数字电源监视和遥测
● 优化
● 预见性维护
● 故障检测
在这我们来看看一种典型的POL内部架构,并研究其对电源系统设计的影响。
POL内部架构
图1示出了具有3个主要功能块的简化POL。
● 监控器
● 监视器
● 数字处理单元
数字处理单元是“大脑”(未示出的是内核电源转换)。数字处理单元负责处理PMBus和CONTROL输入,并把POWER_GOOD和FAULT/置为有效。
大多数器件都具有多个这样的POL,不过为简单起见,我们可以插入输入和输出。
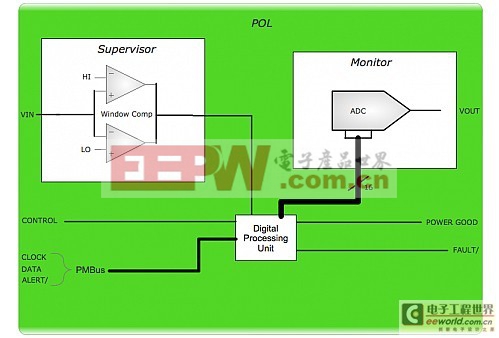
图1:POL结构
监控
监控电路是一个快速动作的单通道比较器或窗口比较器。一般地,输出会绕过数字处理单元中的状态机,并能直接阻止电源转换并把FAULT/置为有效。数字处理单元之后被更新,这样PMBus主机便能查询器件的故障寄存器。
监控器的用途是保护负载和器件,因此它会通过适当牺牲准确度来换取速度的提升。HI/LO数值通常存储于非易失性只读存储器(NVROM)之中,或者由PMBus通过诸如VOUT_UV_FAULT_LIMIT等命令来编程。另外,故障行为特性也被存储在NVROM中,并且包括像“重试”、“重试之间的延迟”等。
监视
监视是一种通过ADC实现的高准确度测量。数字处理单元通常作为一个状态机或软件环路(其负责轮询ADC输出数据并使之可为PMBus所用)来实现。此外,监视数据也可在一个非常准确的数字处理单元伺服环路中使用,以改善输出准确度。
故障
故障会因监控器或监视器而起。对于监控器,DAC给比较器提供一个基准,而输出则直接馈电至FAULT/引脚。而对于监视器,数字处理单元采用一个数字比较器或者至数字处理单元FAULT/引脚的软件条件指令。
权衡折衷
POL设计师所做的折衷相当直观明了。安全性规定了哪些输入和输出具有监控器。监视方面的权衡则涉及准确度(因为ADC占用电路板面积资源且消耗功率)、以及通道的数目和多路复用器等。
作为系统设计师,他必须考虑其系统使用数据的目的、以及它必须具有多高的准确度。例如,典型用途如下:
● 系统开发与运行状况检验和调试
● 效率监视
● 能耗监测
● 故障预测
● 优化(局部和全局)
● 准确度提升(伺服)
实例
每种电源架构都有其与众不同之处,并不存在一组通用的折衷,因此我准备举几个采用监控器和监视器的实例以启发您的想象力。此外,当了解到相关的可能性时,您或许会发现一种竞争优势。
监控器故障发生实例
该实例取自LTC2974,这款监控/监视器件可管理4个POL。其所负责的一个POL的输出电压具有一个基于窗口比较器的监控器。

图2:监控器产生的故障
扫迹4是该器件的FAULT/引脚,而扫迹3则是该器件的ALERT/引脚。我把输出短路至地。在该器件上,接地与FAULT/电平走低之间的延迟大约为12μs。在非常短的时间之后,我们还使一个ALERT/拉至低电平。这些都是非常快速的,因为监控器绕过了监视较慢ADC所需的全部状态机,并直接产生故障。另外,它还停止了电源转换。
来看一下PMBus,PMBus主机完成了一项报警响应地址(ARA)事务。地址0x0C被置于该总线上,而出故障的器件则把地址0x64放在总线上。主机将此右移一位以获得地址0x32。接着,主机通过把地址0x32放置在总线上(后随命令字节0x79)来读取故障寄存器的存储信息。然后,一个具有地址0x32的重复起动信号被置于总线上,并送回两个数据字节以提供一个0x8041的状态字。

图3:故障字位
查看该器件的数据表,其指出将发生欠压故障。
另外,我们也可以利用一种外部工具对此进行观察,该工具可显示器件的寄存器和状态。

图4:故障状态
还记得我的另一篇文章中提出的使用模型吗?
监控器引起了一个支持两种模型的故障。其可由PMBus或一种外部工具来处理。
(注:我们将在今后的文章中看到这种设计的实现方案,但基本上ALERT/引脚连接至一个微控制器中断。)
温度监视实例
许多器件都能够利用一个二极管来监视内部芯片温度和外部温度。在本例中(LTC3880),我有一个电路板管理器,其负责通过PMBus来监视电源轨,并具有一个LCD触摸屏显示器。

图5:温度监视
遥测曲线图示出了内部芯片温度。当我把手指放在器件上而且它冷却时,曲线图中出现了凹陷。曲线图上的最小值和最大值分别为30℃和40℃。由图可见,测量结果相当不错。
器件将采用这种温度监视电路来保护自身,但其亦可用于检测更加细小的问题。如果您添加一个
- 控制系统中常见的几种地线详解(10-13)
- 真正的数字电源是什么?(05-12)
- 如何利用智能MOSFET提升数字电源性能?(12-09)
- 解析数字电源与模拟电源的优劣(12-08)
- 基于数字电源控制器UCD3138的一种新的输入电流检测方法(二)(12-08)
- 数字电源与模拟电源的发展趋势(12-08)